

前言:随着低轨星座的快速建设,低轨增强全球导航卫星系统(LeGNSS)成为目前GNSS应用与服务的一大研究热点,尤其是精密单点定位快速收敛方面。为综合评估低轨增强精密单点定位性能,同济大学GNSS团队开展了基于低轨导航卫星系统增强的无电离层组合(IF),非差非组合(UDUC)和电离层加权模型(IW)三种模型以及有无系统间偏差(ISB)约束的精密单点定位研究。研究成果以“LEO enhanced GNSS (LeGNSS) Precise point positionin...
2024-06-24
平面是人造场景中常见的几何特征,在点云配准和三维重建中有着广泛应用。自动驾驶和机器人等领域通常采用机械式激光雷达,这类激光雷达的扫描方式使得获取的点云具有稀疏且密度不均的特性,为平面提取带来了挑战。为了获得可靠的平面提取结果,需要充分利用传感器的扫描方式。同济大学GNSS团队基于由点到线再到平面的框架,提出了一种面向机械式激光雷达的平面提取新方法。研究成果以“Noise model based line segmentation for...
2024-05-09
课题组撰写的论文《Vectorial integer bootstrapping of best integer equivariant estimation (VIB-BIE) for efficient and reliable GNSS ambiguity resolution》在大地测量领域期刊Journal of Geodesy发表,https://doi.org/10.1007/s00190-024-01836-3可靠的整数模糊度解算(IAR)是利用全球导航卫星系统(GNSS)的载波相位观测值实现厘米级定位的关键。在所有 IAR 方法中,最优整数等变(BIE)估计器是均方误差最小的估计...
2024-04-17
课题组撰写的论文《A real-time detection method for GPS flex power》在卫星导航领域期刊GPS Solutions发表,DOI:10.1007/s10291-024-01653-
2024-04-30
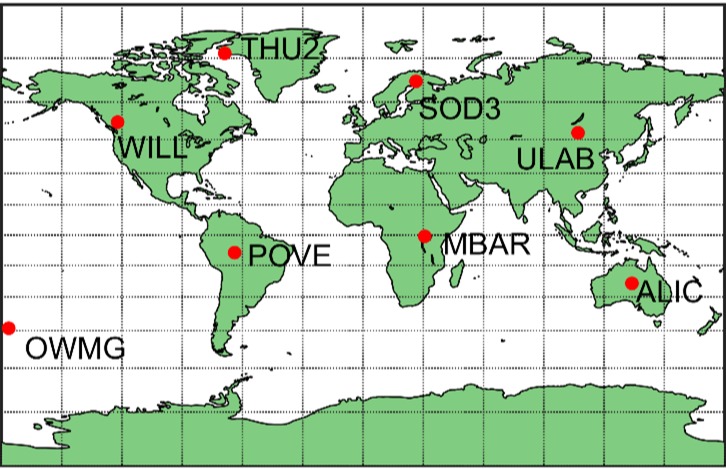
课题组撰写的论文《ROTI-based statistical regression models for GNSS precise point positioning errors associated with ionospheric plasma irregularities》在卫星导航领域期刊GPS Solutions发表,DOI:https://doi.org/10.1007/s10291-024-01648-0中小尺度电离层不规则体及其造成的闪烁效应是影响全球导航卫星系统(GNSS)定位性能的重要因素之一,异常的电离层条件会严重干扰卫星跟踪,降低系统的精度、可靠性和完整性。论...
2024-04-26
课题组撰写的论文《Integer ambiguity resolution and precise positioning for tight integration of BDS-3, GPS, GALILEO, and QZSS overlapping frequencies signals》在期刊GPS Solutions发表,DOI: 10.1007/s10291-021-01203-1各GNSS系统播发的重叠频率使得GNSS系统间紧组合成为近年来的研究热点,已有大量文章得出GNSS系统间紧组合相比于GNSS系统间松组合,其模糊度性能更优、能够加快模糊度收敛、提高定位精度等。但是现...
2021-12-22
课题组撰写的论文《LEO Enhanced Global Navigation Satellite System(LeGNSS): progress, opportunities, and challenges》在期刊Geo-spatial Information Science发表,DOI: 10.1080/10095020.2021.1978277文章分析了未来低轨卫星增强GNSS的优势、劣势以及发展前景,尤其是针对精密卫星定轨、精密单点定位(PPP)、地球自转参数估计、全球电离层建模等问题做了全面的分析。在精密定轨方面,通过联合处理低轨卫星与GNSS卫星的...
2021-10-27
课题组撰写的论文《Improved precise positioning with BDS‑3 quad‑frequency signals》在期刊 Satellite Navigation 发表,DOI:10.1186/s43020-020-00030-y这篇文章讨论了北斗三代卫星导航系统四频信号的优势,包括多频高精度定位的精度提升和用于即时模糊固定的超宽巷和宽巷组合的复杂选择。本文基于精密单点定位模型,通过理论推导说明了观测值频率增加对定位的增益。本文基于总体噪声水平选择易于固定的超宽巷组合,并根...
2020-12-13
课题组撰写的论文《Can long-range single-baseline RTK provide comparable service as network-RTK in Shanghai?》在期刊 ASCE 在线发表,DOI:10.1061/(ASCE)SU.1943-5428.0000324。 本文详细分析并比较了网络RTK技术与单基站RTK技术的优劣性能,并通过实验验证基于多频多模的单基站RTK技术能够替代网络RTK技术在上海地区提供等效的高精度导航位置服务。若使用多频多模单基站RTK技术,在上海地区只需...
2020-07-20课题组在UPINLBS 2018会议作口头报告,并撰写会议论文《Integration of UWB and IMU for precise and continuous indoor positioning》。该论文研究了一种低成本惯导系统(IMU)和超宽带定位系统(UWB)的融合定位方法。利用扩展卡尔曼滤波,对IMU和UWB的位置和速度进行松组合。通过惯导系统辅助,可以更有效的减弱UWB非视距误差,并在UWB信号缺失的情况下保持定位结果的精度和稳定性。与单UWB系统相比,UWB和IMU的组合结果具有...
2019-11-25Copyright@同济大学GNSS研究团队 ALL Rights Reserved
您是本站的第位访客

关注公众号
