

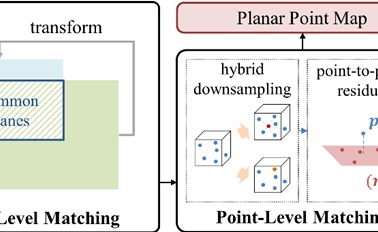
同济大学GNSS研究团队提出了平面特征的误差修正模型以及基于该模型的激光里程计方法。该方法以平面作为地标进行点云配准,在估计相对位姿的同时对平面参数误差进行修正,得以持续维持高质量的平面地图并有效抑制里程计漂移,实现结构化环境下的高精度实时定位。
2026-05-12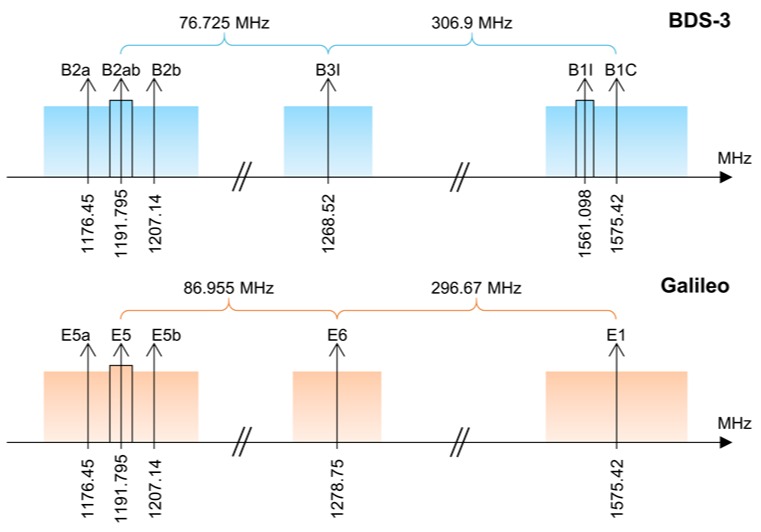
同济GNSS团队深耕多频信号数据处理领域多年,依托团队建立的多频模糊度解算基础理论,围绕最优组合系数确定、超宽巷/宽巷模糊度解算、快速精密定位应用三大核心内容,聚焦基站稀疏条件下的长基线定位应用场景,开展系统性理论研究和实验验证,旨在提升北斗/GNSS快速精密定位能力、拓展定位服务覆盖范围。
2026-05-12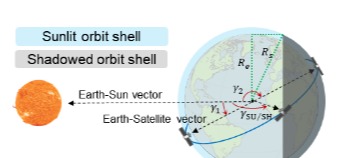
同济大学GNSS研究团队提出了一种顾及动态接收机相关偏差(DRDB)的精密定轨精化函数模型。该研究对RDB的时变特性进行了显式参数化,并结合低轨卫星的周期性热环境构建了严谨的物理约束模型,可有效刻画动态接收机相关偏差的演化规律。
2026-05-12
论文简介精确的低轨卫星钟差预报是实现高精度实时低轨增强导航的前提之一。与搭载原子钟的GNSS卫星不同,低轨卫星通常搭载的晶振(如USO)稳定性较差,且受复杂的空间环境影响,其钟差特性更加复杂,传统的模型驱动方法难以实现对低轨卫星钟差的高精度预报。为解决这一难题,同济大学GNSS团队提出了一种神经网络补偿的卫星钟差预报方法(NNC-SP)。该方法构建了“物理模型基准+深度学习补偿”的混合框架,并针对钟差序列特性设...
2026-02-08
同济大学GNSS团队充分挖掘区域多监测站的时空关联特性,提出一种GNSS多基线联合简便解算的变形监测方法,可有效改善复杂场景下模糊度解算能力和变形监测服务性能。该成果以“GNSS多基线联合解算的高精度变形监测方法”为题发表于期刊《测绘学报》,论文第一作者为李博峰教授,第二作者为硕士生陈龙。该研究受到国家自然科学基金、上海市科委科技创新计划、上海市协同创新专项资金等科研项目资助。论文简介GNSS变形监测应用面临...
2026-02-08
同济大学GNSS团队结合低轨卫星轨道动力学信息以及深度学习对复杂模式的建模能力,提出深度神经网络增强约化动力轨道预报方法(DNN-RDOP),轨道预报精度进一步提升。该成果以“Deep Neural Network based precise orbit prediction for Low Earth Orbit (LEO) satellites”为题发表于国际大地测量顶刊《Journal of Geodesy》,论文第一作者为李博峰教授,第二作者为博士生吴天昊。该研究受到国家自然科学基金、国家重点研发计划...
2025-09-28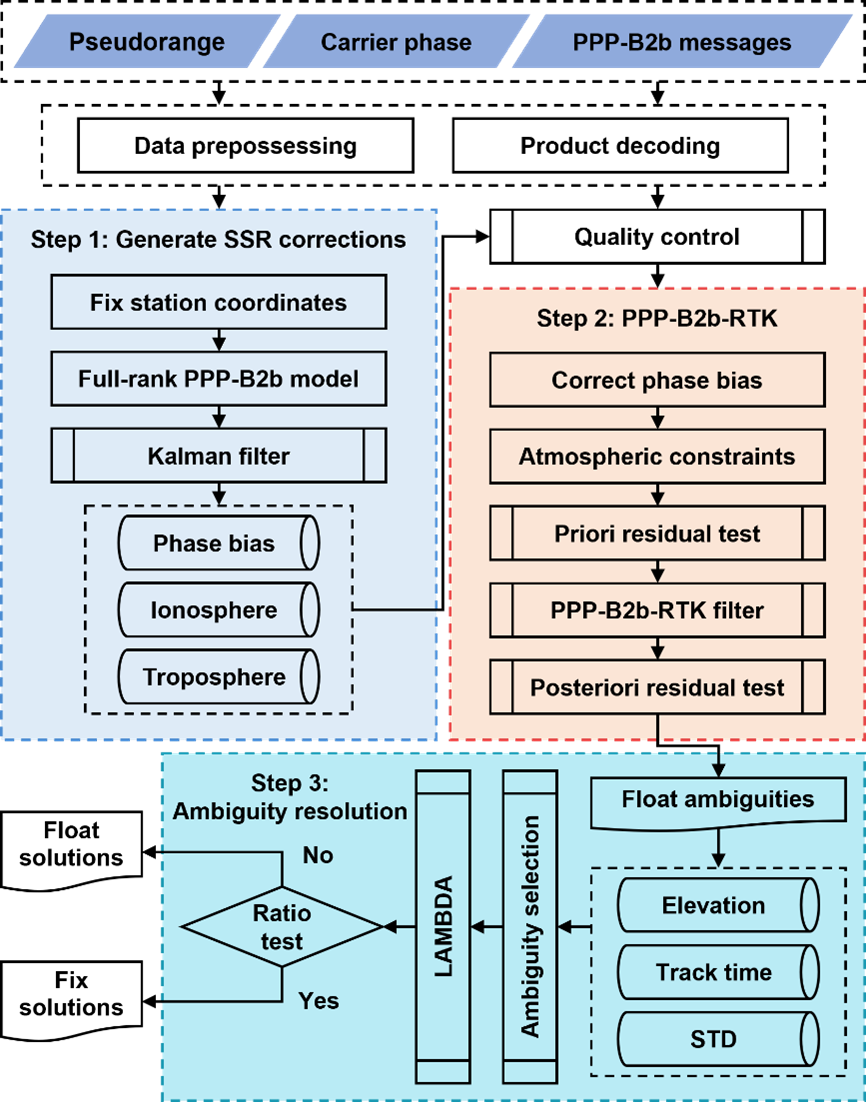
作为北斗三号系统特色功能之一,PPP-B2b服务能够向亚太地区单接收机用户提供不依赖于常规通讯手段的精密单点定位服务,为通讯受限、基站稀疏场景下(远海、沙漠、无人岛礁等)的精密定位应用提供了新的解决思路。随着海洋强国、一带一路等国家战略纵深推进,特殊场景下的实时高精度定位需求日益凸显。然而,PPP-B2b的实时定位精度仅有分米级,且需数十分钟的收敛。其核心原因在于,现有改正数增强下的模糊度参数不具备整周特性...
2025-06-22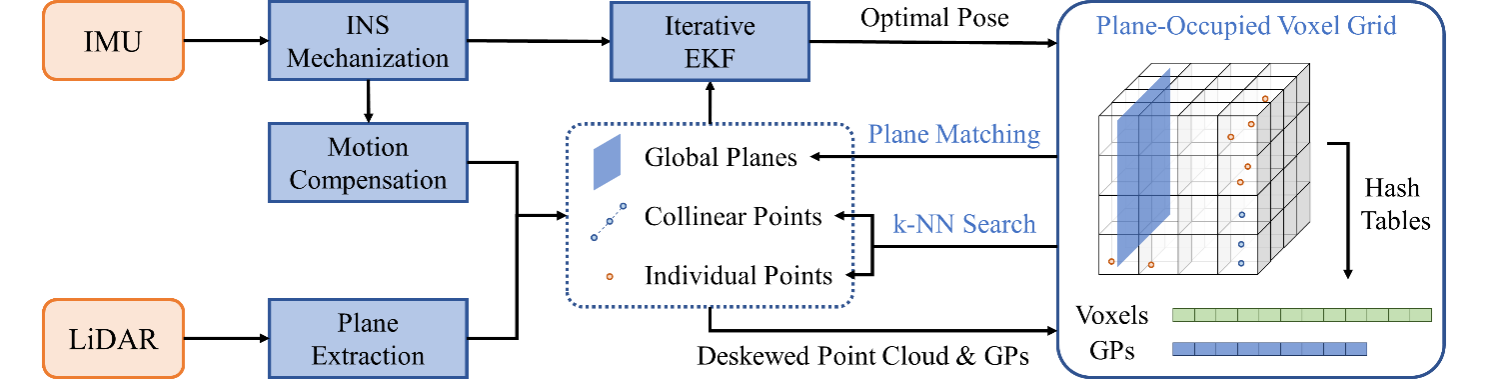
平面是对物体表面的一种直观的描述方式,作为几何特征被广泛应用在激光(惯性)里程计中。现有方案通常以最近邻搜索或体素化的方式构建局部平面,难以获取完整的平面信息(如墙面),从而导致平面拟合精度低以及引入大量冗余约束的问题。尽管已有方案显式地提取全局平面用于定位,但它们未能充分利用点云的全部信息,往往只适用于室内场景。针对上述问题,同济大学GNSS团队从数据关联和地图表示等方面入手,系统性地将全局平面...
2025-06-22
GPS的弹性功率可通过增强传输功率来提高信号抗干扰能力。然而在弹性功率开启期间,低轨卫星GRACE-FO的定轨精度明显下降。为提升GRACE-FO定轨精度,本文首先探究了弹性功率期间定轨精度下降的原因,分析了GRACE-FO的历元间无几何组合(∆ΦGF)和信噪比(SNR),并基于∆ΦGF和SNR特点提出了相应的定轨策略,有效改善GRACE-FO定轨精度。研究成果以“A strategy to determine GRACE-FO kinematic orbit during the activation of ...
2025-06-22
无人智能载体安全工作依赖于精准的位置和姿态信息。目前基于全球导航卫星系统(GNSS)与惯性导航系统(INS)的组合导航技术是行业内的首选定位定姿方案。但当卫星信号受到长时强干扰时,INS误差累积将导致GNSS/INS组合系统的精度快速发散。尽管引入其他传感器(如雷达、相机、里程计等)是一种解决手段,但这些传感器高度依赖基础设施,且只能提供空间相对位姿信息,依然面临长期发散风险。作为唯一能够提供绝对位姿的信息源,G...
2025-06-22Copyright@同济大学GNSS研究团队 ALL Rights Reserved
您是本站的第位访客

关注公众号
