北斗卫星导航系统(BDS-3)已实现全球覆盖,其自主导航(AutoNav)能力是保障系统长期自主、可靠运行的核心。然而,仅依赖星间链路(ISLs)的AutoNav系统面临一个根本性理论瓶颈——星座整体旋转模糊度。由于地球引力场的球对称特性,纯ISLs的相对距离观测无法唯一确定星座在惯性空间中的绝对方向,导致升交点赤经(RAAN)和轨道倾角(i)等角度参数发生协同漂移。这种系统性误差随时间累积,严重制约了用户测距误差(URE)的长期稳定性。
针对该难题,同济大学GNSS团队通过理论推导与数值仿真验证了增加星间定向观测(Inter-Satellite Directional Observations, ISDOs)的有效解决方案。通过数学推导与AutoNav状态协方差矩阵分析,从理论上证明:ISDOs对星座旋转误差具有内在敏感性。仿真结果表明,引入ISDOs可有效抑制轨道角度参数的公共漂移,将水平轨道误差与URE稳定控制在厘米至分米量级,显著提升长期AutoNav性能。同时,轨道与钟差的2小时预报精度亦表现出优异的稳定性,满足实时精密导航服务需求。
研究进一步验证了该方案的工程落地潜力。即便采用极简部署策略——例如仅单颗卫星搭载星相机,每日对目标卫星及背景恒星成像一次——即可实现URE优于0.5米的导航精度(不含地球自转参数预报误差);即使将观测频率降至每20天一次,仍可满足URE小于2米的定位标准。
该成果以"Constraining constellation rotation in BDS-3 autonomous navigation: analytical and simulation studies of inter-satellite directional observations"为题,发表于国际航空航天与电子系统领域顶级期刊《IEEE Transactions on Aerospace and Electronic Systems》。论文第一作者为同济大学副教授乔晶,通讯作者为李博峰教授。该研究受到国家自然科学基金、上海市教委创新计划等项目的资助。
主要内容
1. ISDOs观测模型与星座旋转可观测性分析
相应的线性化观测方程为:
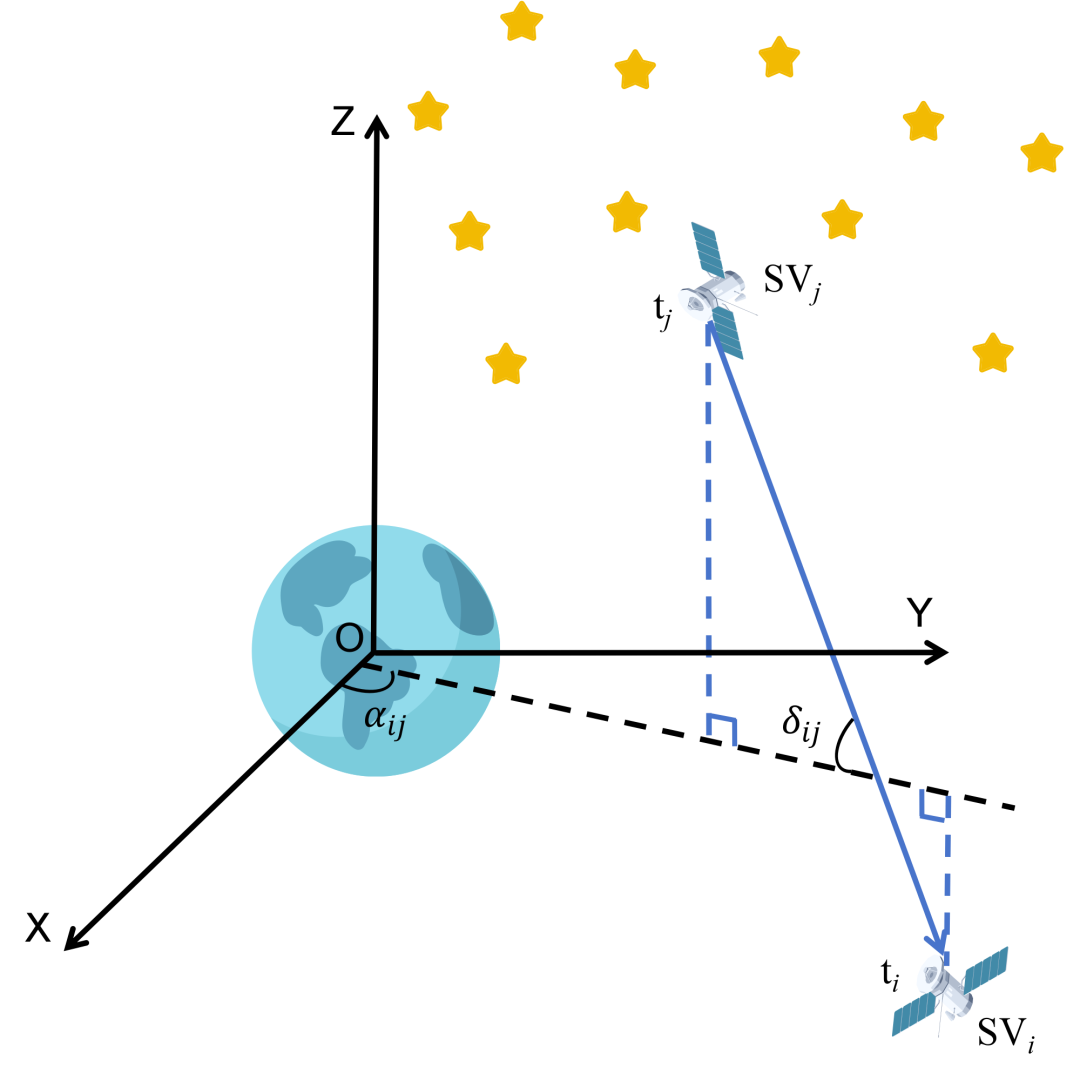
图1 基于摄影设备的星间定向观测(ISDOs)示意图
2. 星座旋转误差的可观测性分析
本研究从几何观测特性与状态估计结构两个维度,剖析了星座旋转误差的可观测性问题。
1)几何观测特性:测距的旋转不变性与测向的敏感性
当卫星SVi和SVj的轨道旋转误差Ri=Rj时:由于旋转变换保持向量模长不变,星间测距计算值与真实测量距离相等(不考虑观测噪声)。这意味着,纯星间测距观测对星座整体的刚体旋转误差完全不敏感,无法在解算中区分真实位置与旋转偏差。而旋转变换会改变相对位置矢量的方向,星间测向计算值与真实测量方向信息不一致。这表明,星间测向观测值能够直接捕捉到系统的整体旋转误差。
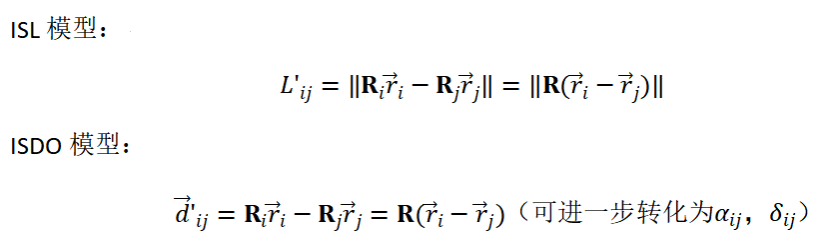
2)状态估计结构:基于相关矩阵的耦合度分析
卫星状态参数的相关性矩阵直观揭示了引入ISDOs前后系统内部误差传播结构的演变(见图2)。仅使用ISLs的自主导航模式下,不同卫星之间、以及同一卫星不同方向的状态参数(如位置与速度分量)之间存在显著的正/负相关性——例如,X与Y方向分量的相关系数可达±0.5以上。这种强耦合易导致误差在星座内部跨维度、跨卫星传播,削弱系统稳定性。而当引入ISDOs后,相关结构发生显著简化:同方向分量(如X–X、Y–Y、Z–Z)仍保持合理的正相关性,但交叉方向分量(如X–Y、Vx–Vy等)之间的耦合被大幅抑制,其相关系数普遍降至±0.1以内。这一变化有效削弱了状态参数间的强耦合效应,增强了系统的可观测性与解算独立性,从而显著提升整体鲁棒性。
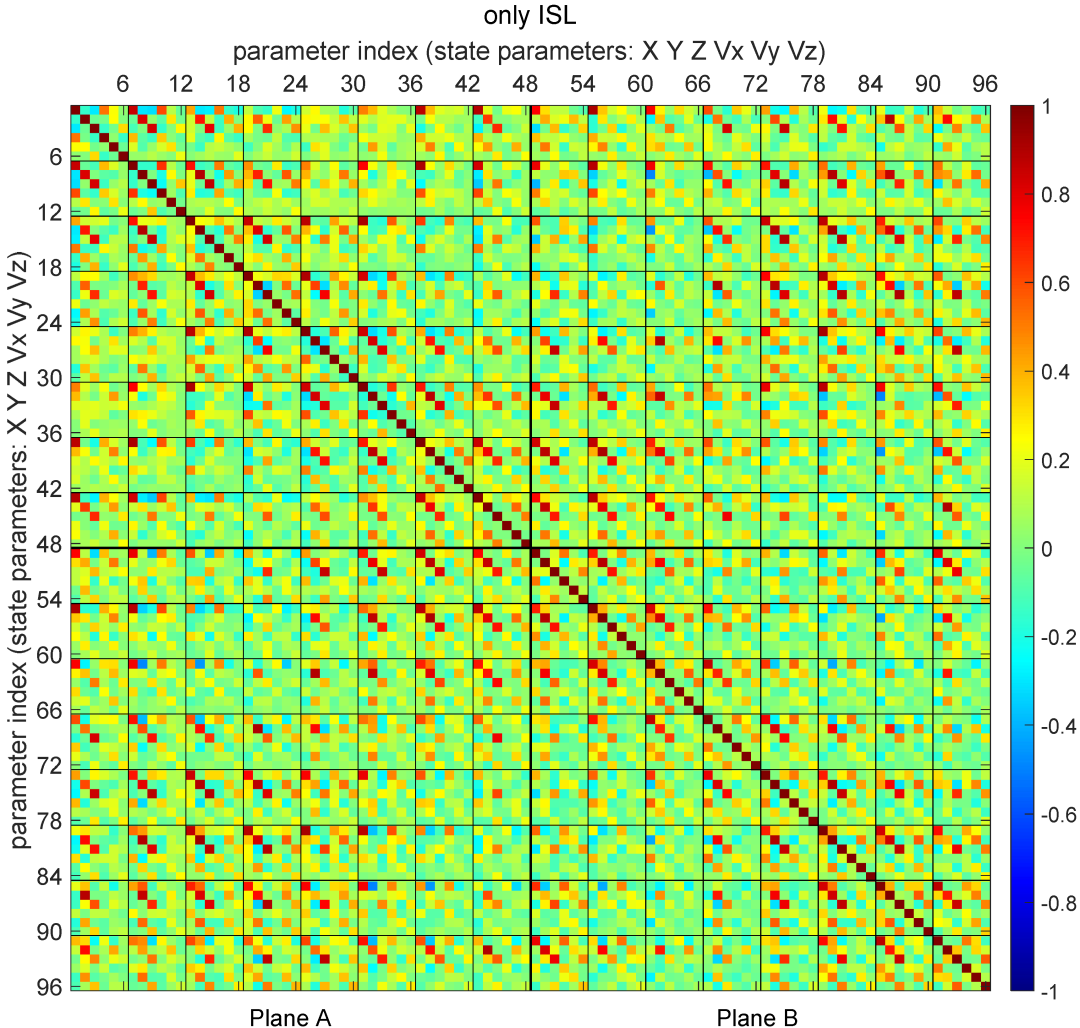
图2a 仅ISLs方案下卫星状态参数的相关矩阵(Only ISLs)
图2b ISLs+ISDOs方案下卫星状态参数的相关矩阵(ISLs and ISDOs)
3. 自主导航性能分析
研究通过为期180天的高保真仿真,系统评估了ISDOs(假设观测精度为5 mas)对BDS-3 AutoNav性能的提升效果。
误差稳定性:在纯ISLs模式没能对旋转问题进行有效抑制的情况下,卫星的水平轨道误差与URE呈现持续增长趋势(见图3);而引入全网ISDOs后,二者被稳定控制在厘米至分米量级,无明显漂移(见图4)。
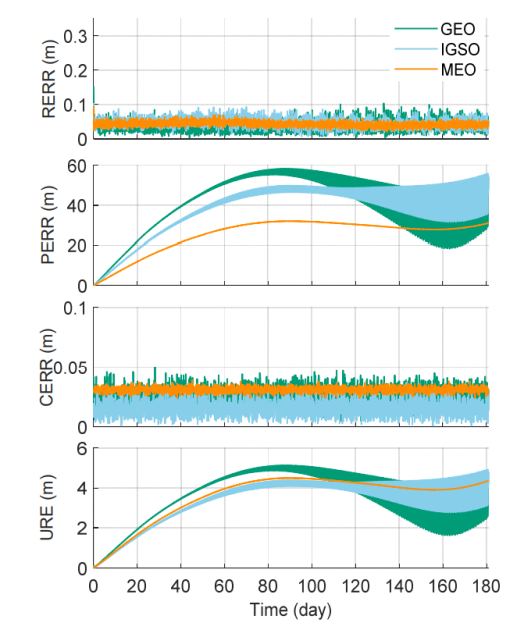
图3 仅ISLs模式下的AutoNav误差演化
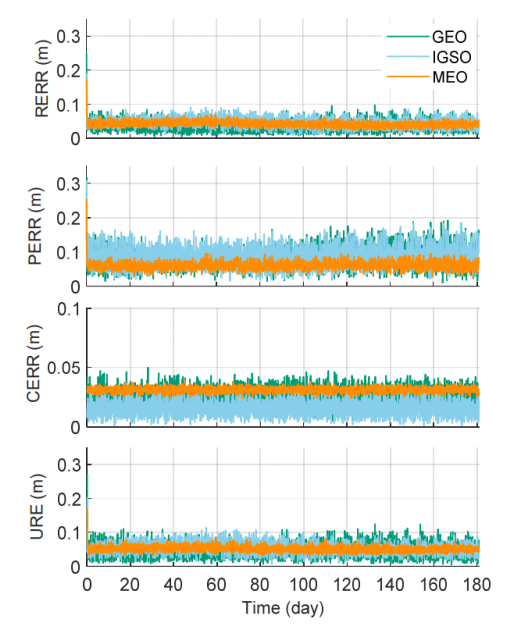
图4 ISLs+ISDOs模式下的AutoNav误差演化
根源机制:水平轨道误差和URE漂移源于轨道角度参数(RAAN、倾角等)的同步公共偏差,表现为整个星座(尤其是同一轨道面内)发生协同"旋转"(见图5左)。ISDOs的引入,为星座建立了绝对的方向基准,有效锚定了星座整体方位,从机理上杜绝了此类协同漂移的发生(见图5右)。
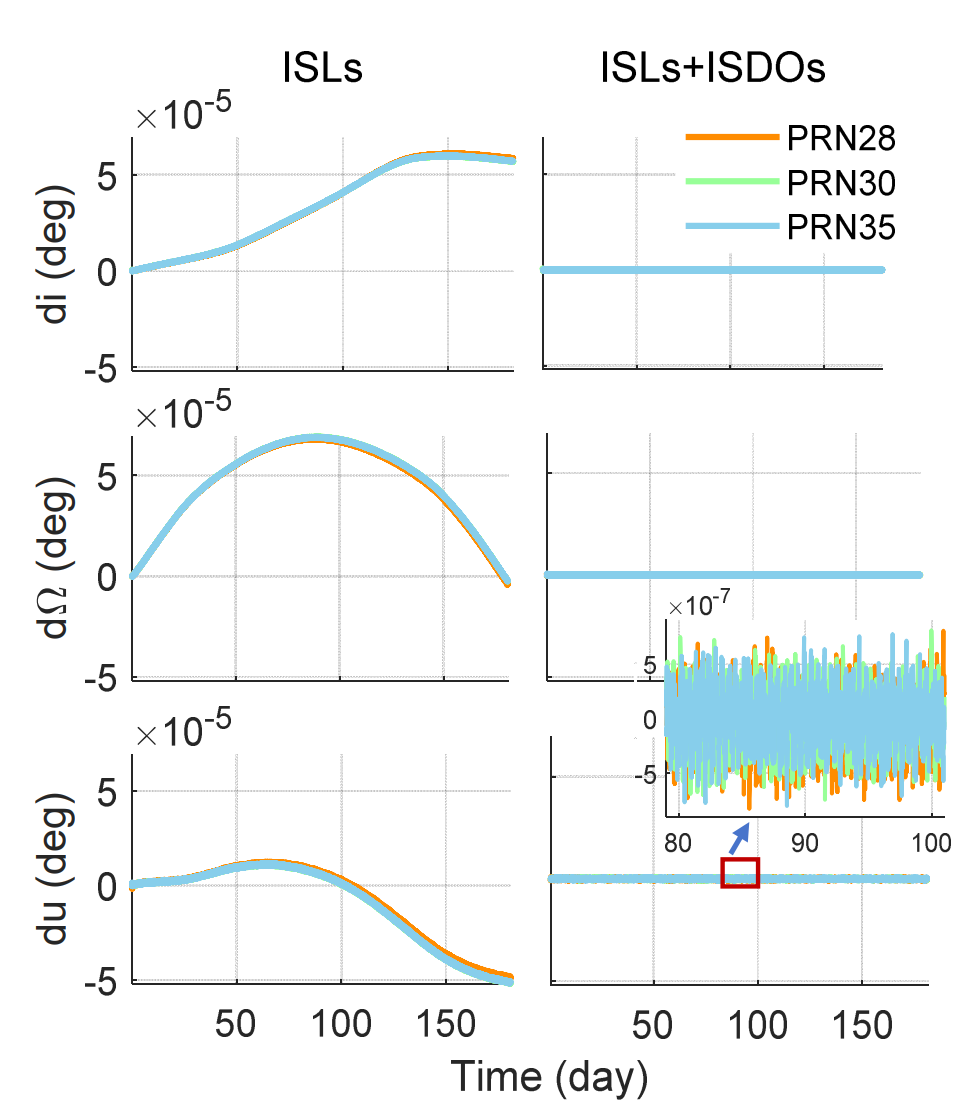
图5 轨道角度参数的漂移误差对比(左:仅ISLs;右:ISLs + ISDOs)
预报能力:ISDOs同样显著提升实时广播星历的预报性能。2小时轨道与钟差预报产品的URE保持高度稳定(见图6),满足实时精密导航服务需求。
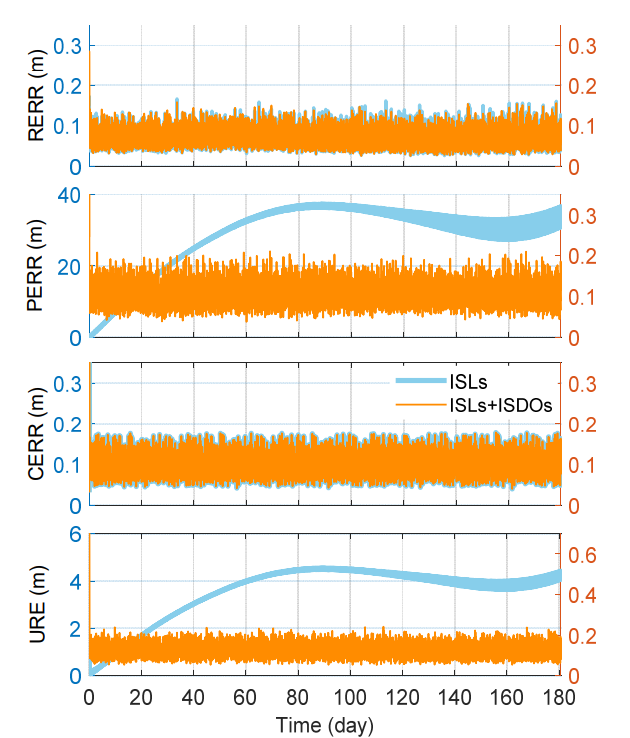
图6 2小时预报AutoNav性能对比
低成本部署方案:研究重点验证了简化拓扑与低频观测的可行性。
1)拓扑简化:仅需单颗卫星具备ISDO能力,或全网维持一对ISDDO观测,即可获得接近全网观测的性能增益(见图7);
2)频率降低:每日一次ISDOs观测,URE稳定优于0.5米;每10天一次ISDOs观测,URE可控制在1米以内;每20天一次ISDOs观测,URE可控制在2米以内(见图8)。
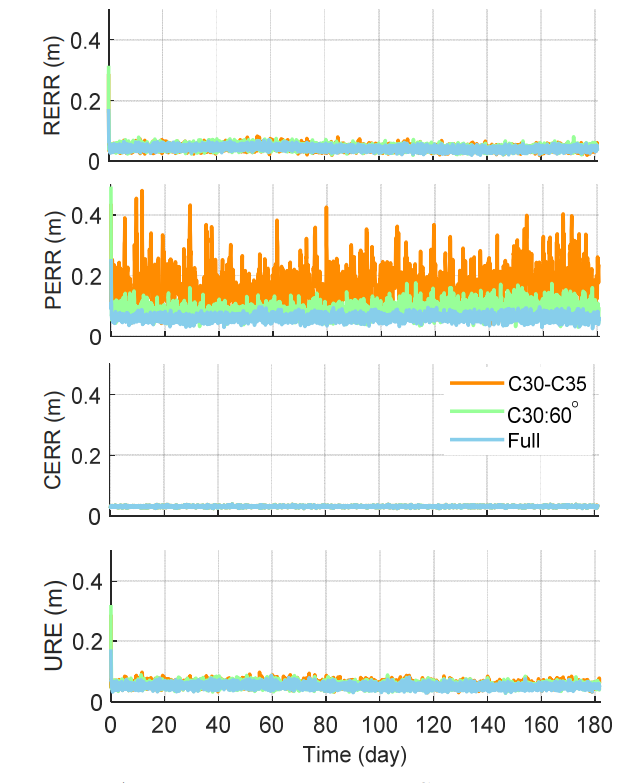
图7 不同ISDO拓扑结构下的AutoNav性能
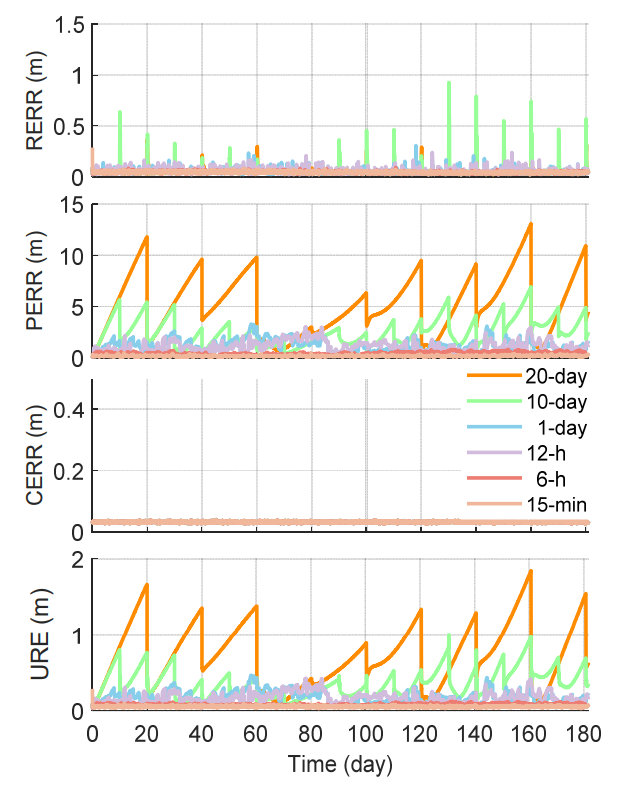
图8 不同ISDO观测频率下的AutoNav性能
论文信息
J. Qiao, B. Li, X. Hu and Y. Zhu, "Constraining Constellation Rotation in BDS-3 Autonomous Navigation: Analytical and Simulation Studies of Inter-Satellite Directional Observations," in IEEE Transactions on Aerospace and Electronic Systems, doi: 10.1109/TAES.2026.3656158.



