GPS的弹性功率可通过增强传输功率来提高信号抗干扰能力。然而在弹性功率开启期间,低轨卫星GRACE-FO的定轨精度明显下降。为提升GRACE-FO定轨精度,本文首先探究了弹性功率期间定轨精度下降的原因,分析了GRACE-FO的历元间无几何组合(∆ΦGF)和信噪比(SNR),并基于∆ΦGF和SNR特点提出了相应的定轨策略,有效改善GRACE-FO定轨精度。研究成果以“A strategy to determine GRACE-FO kinematic orbit during the activation of flex power” 为题发表于国际期刊《GPS Solutions》,论文第一作者为硕士生蒙冠龙,通讯作者为葛海波副教授。该研究受到国家自然科学基金、上海市科委科技创新计划等科研项目资助。
图1 论文发表成果
以JPL提供的GRACE-FO约化动力学轨道为参考,评估格拉茨技术大学(Graz University of Technology)提供的GRACE-FO几何法轨道的精度,结果如图2所示。红点和蓝点分别为GRACE-C和GRACE-D的轨道误差,灰色区域为GPS弹性功率开启日期。由图可见,在弹性功率开启期间,GRACE-FO的定轨误差显著增大。弹性功率对信号功率的增强效果可通过载噪比(SNR)体现,此外,在低轨卫星几何法定轨中,高精度载波相位观测值的合理处理(模糊度连续性探测和模糊度初始化)是获取精密轨道的关键。因此,为探究弹性功率如何影响定轨精度,本文对GRACE-FO的∆ΦGF和SNR进行分析。
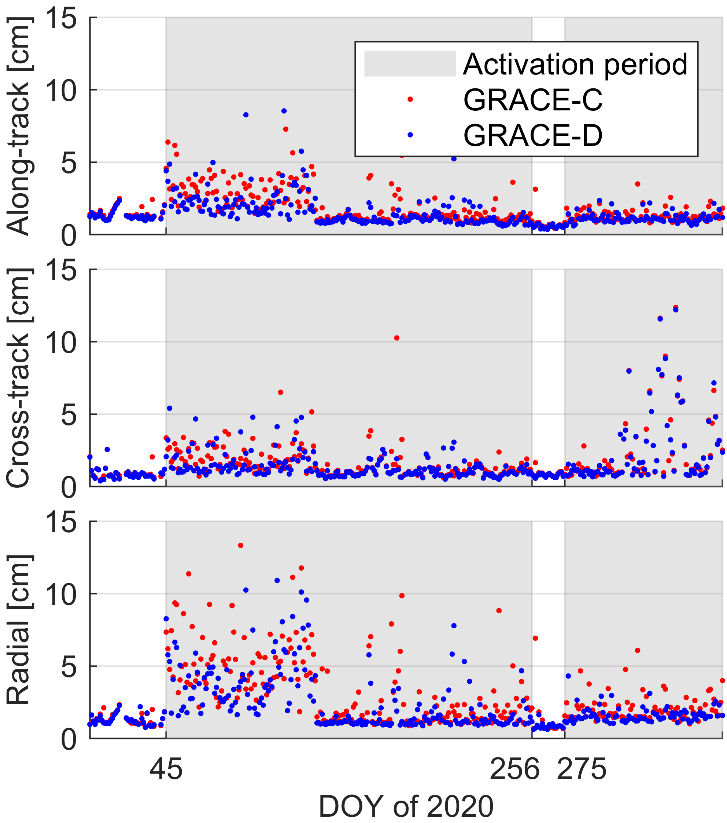
图2 2020年GRACE-FO定轨精度(格拉茨技术大学发布的几何轨道与JPL发布的约化动力学轨道比较)
图3展示了2020年2月16日GRACE-C的定轨误差,图3(a)中的黑色虚线表示03:17:50。在黑色虚线时刻,GRACE-C观测到G10,G14,G20和G32卫星,并且GRACE-C的定轨误差突然增大。以上四颗卫星中,G10和G32开启弹性功率,而G14和G20不具备弹性功率的功能。如图3(c)和(d)所示,G14和G20的SNR和∆ΦGF在03:16~03:20时段平稳变化。在图3(e)中,G32的SNR上下波动但无显著跳变,且∆ΦGF平稳变化。在图3(b)中,G10的SNR和∆ΦGF在03:17:50前和03:18:10后平稳变化,而在03:17:50时发生跳变。G10的SNR由942V/V减小至653V/V,∆ΦGF由0.006m增大至0.090m。
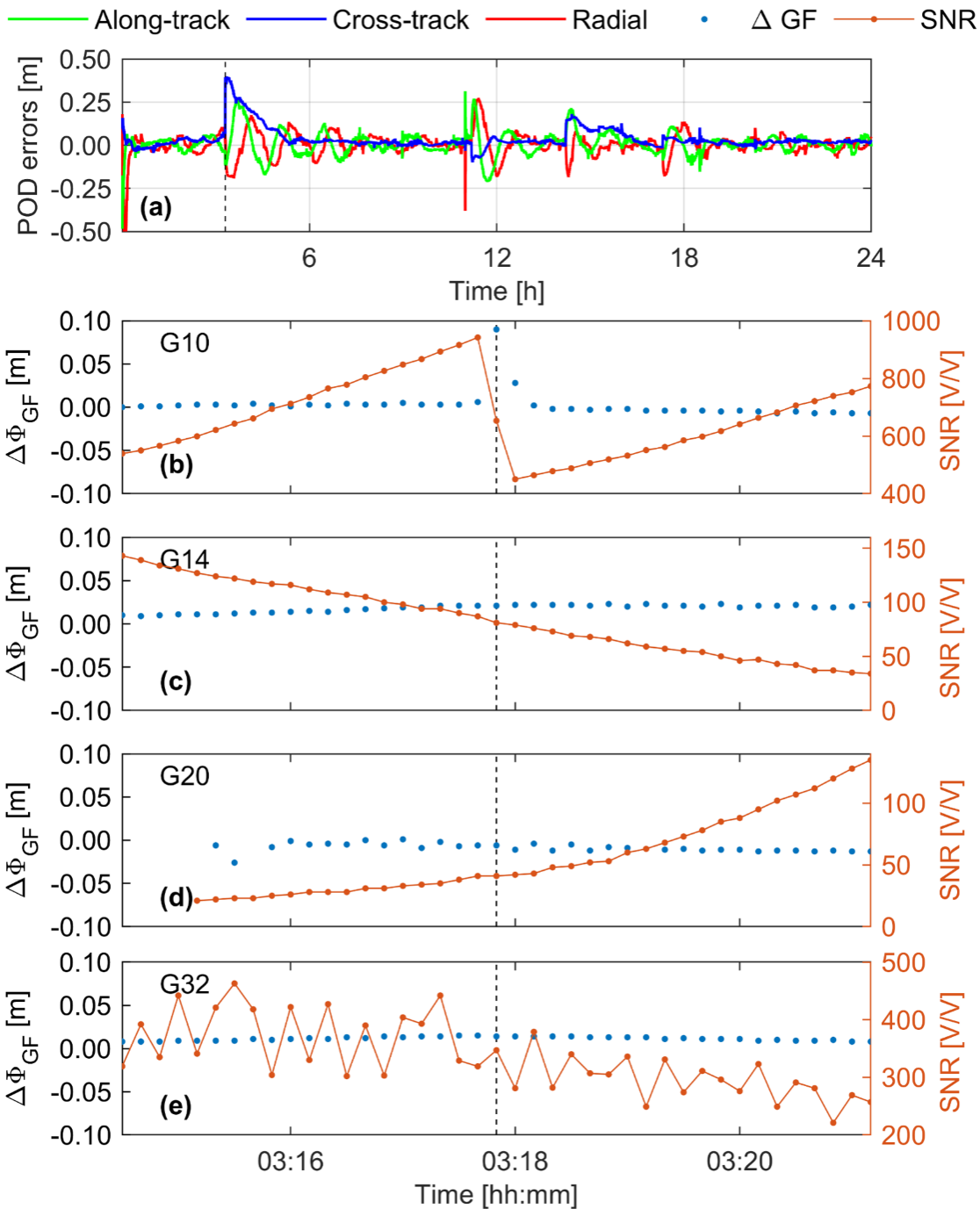
图3 2020年2月16日GRACE-C定轨误差及G10、G14、G20和G32的∆ΦGF与SNR时间
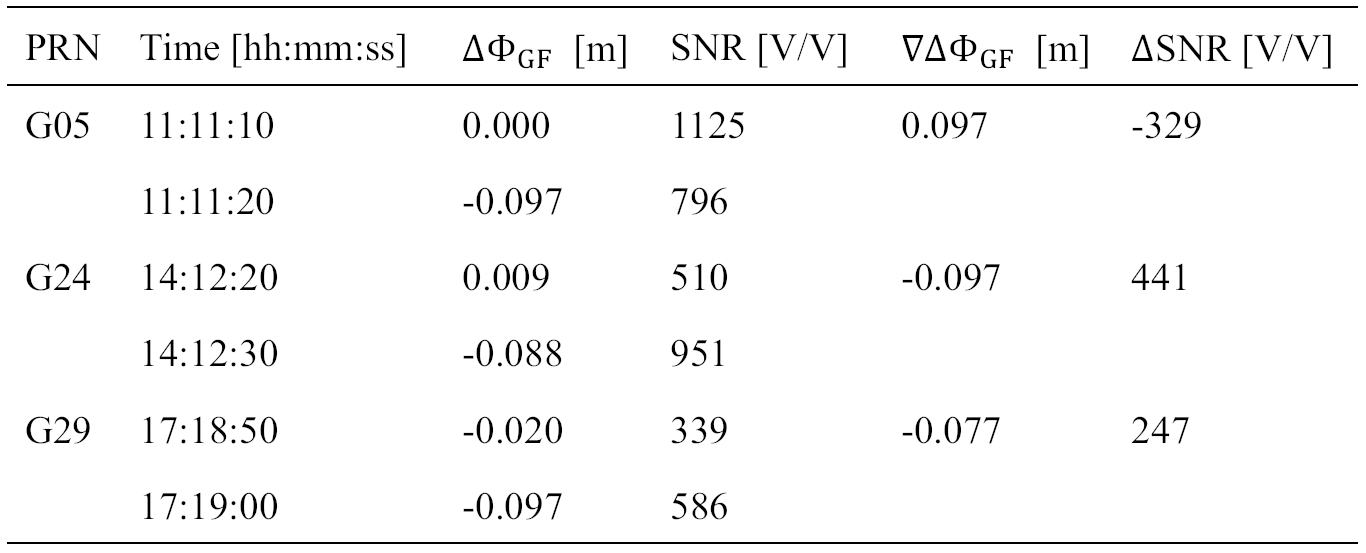
相似的现象也同样发生于该日的11:11:20、14:12:30和17:19:00时刻,如图4所示,相应的SNR和∆ΦGF及其变化量(和∇∆ΦGF)列于表1。从表中可以看出,G05的∆ΦGF在11:11:20时达到-0.097m,其SNR也从1125V/V跳变至796V/V。对于G24,其SNR变化量在14:12:30时为441V/V,∆ΦGF达到-0.088m。此外,在17:19:00时刻,G29的SNR由339V/V增大至586V/V,∆ΦGF为-0.097m。为确定弹性功率开启期间更优的定轨策略,尝试对03:17:50、11:11:20、14:12:30和17:19:00时刻的G10、 G05、G24和G29分别进行模糊度初始化。
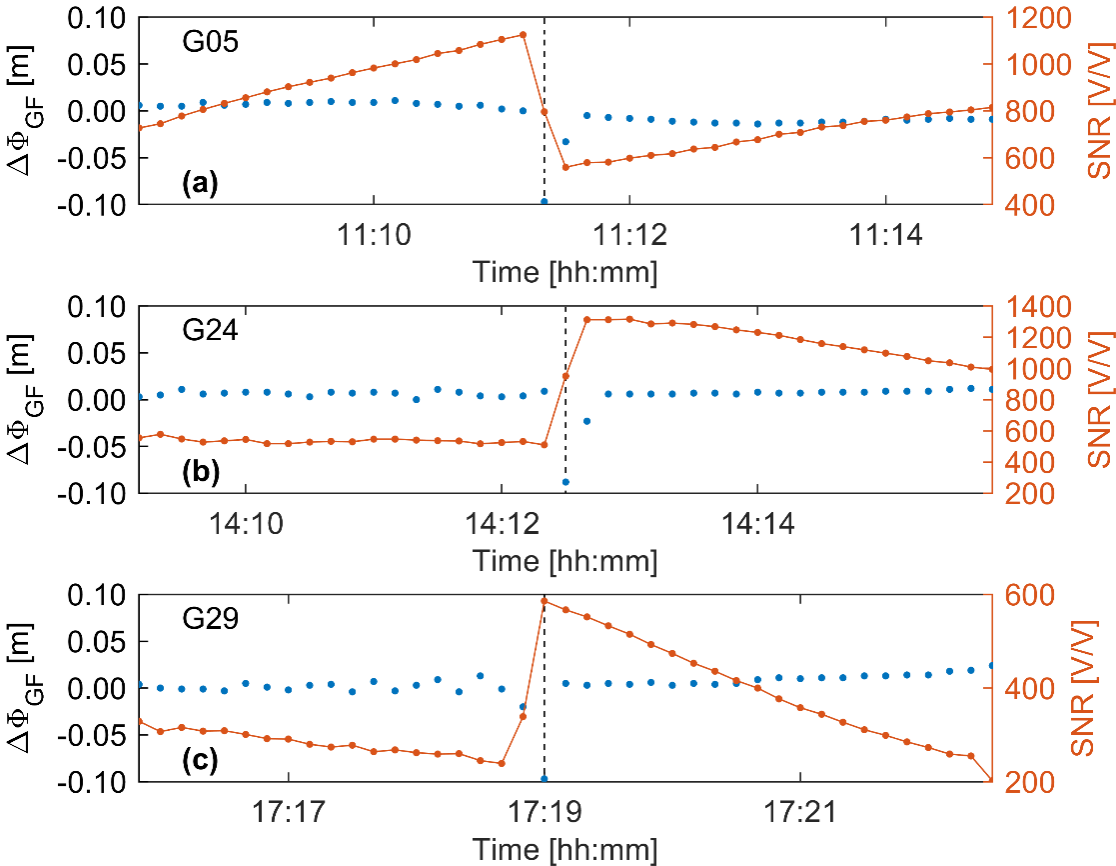
图4 GRACE-C在2020年2月16日观测G05、G24和G29的∆ΦGF与SNR时间序列
表1 G05、G24和G29分别在11:11:20、14:12:30和17:19:00前后的SNR和∆ΦGF及其变化量
定轨结果如图5所示。可见,模糊度初始化后的定轨误差明显下降,切向、法向和径向的误差由(8.66,7.95,9.16)cm减小至(3.95,2.34,5.10)cm,分别改善了54%,70%和44%。上述结果表明,模糊度连续性的错误探测为定轨精度下降的主要原因,SNR可用于反映模糊度连续性,弹性功率开启期间的∆ΦGF探测阈值需要进一步研究。
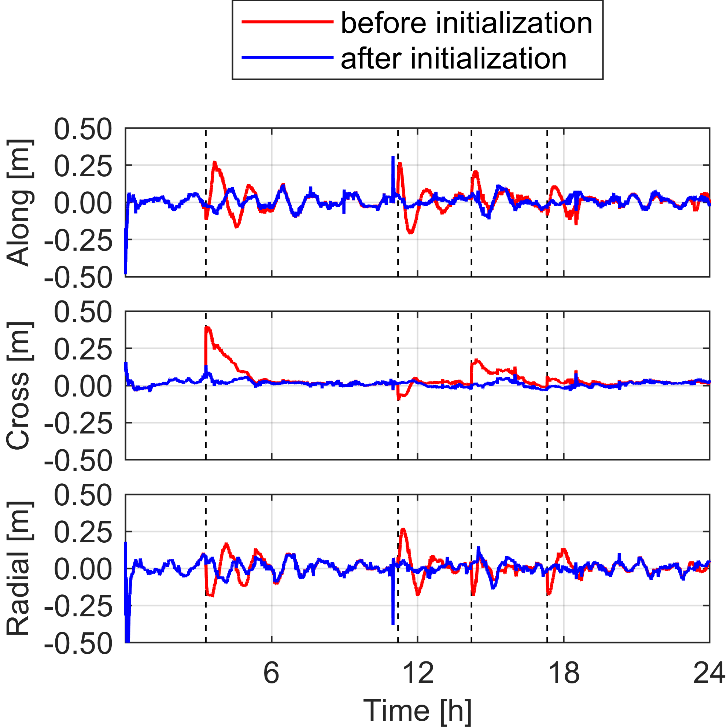
图5 GRACE-C模糊度初始化前后的定轨误差序列
为确定弹性功率开启期间的∆ΦGF探测阈值,采用30天GRACE-FO观测数据进行分析和比较。图6展示了利用星载GRACE-FO观测数据在GPS弹性功率开启和关闭时段的∆ΦGF分布,GRACE-C在有无弹性功率时期∆ΦGF绝对值的98th分位数分别为1.88和2.71cm,GRACE-D的则分别为1.87和2.85cm,如黑色虚线所示。将3倍98th分位数作为∆ΦGF的探测阈值。
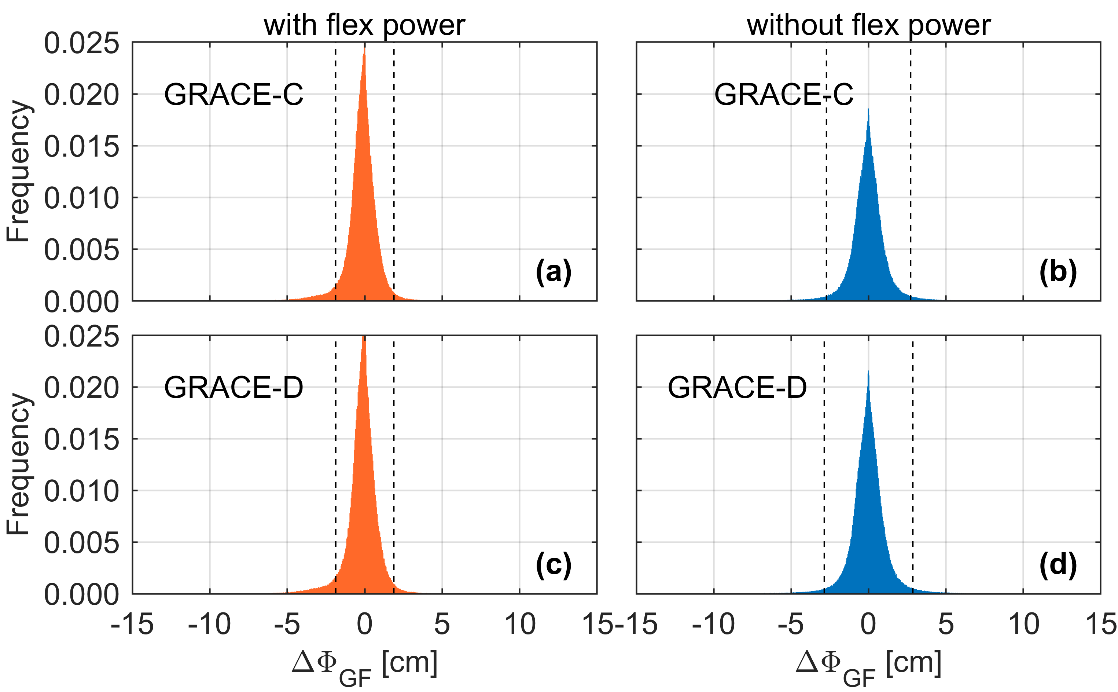
图6 GRACE-FO在弹性功率开启和关闭时期的∆ΦGF分布
根据信号传输过程和SNR的定义,构建SNR跳变检测量,用DR表示。图7展示了弹性功率开启期间GRACE-FO的DR历元差(∆DR)分布。二者服从正态分布,GRACE-C和GRACE-D的均值分别为-0.0008和-0.0020,标准差分别为0.0430和0.0443。根据经验,GRACE-C和GRACE-D的SNR跳变探测阈值分别设为0.1720和0.1772。
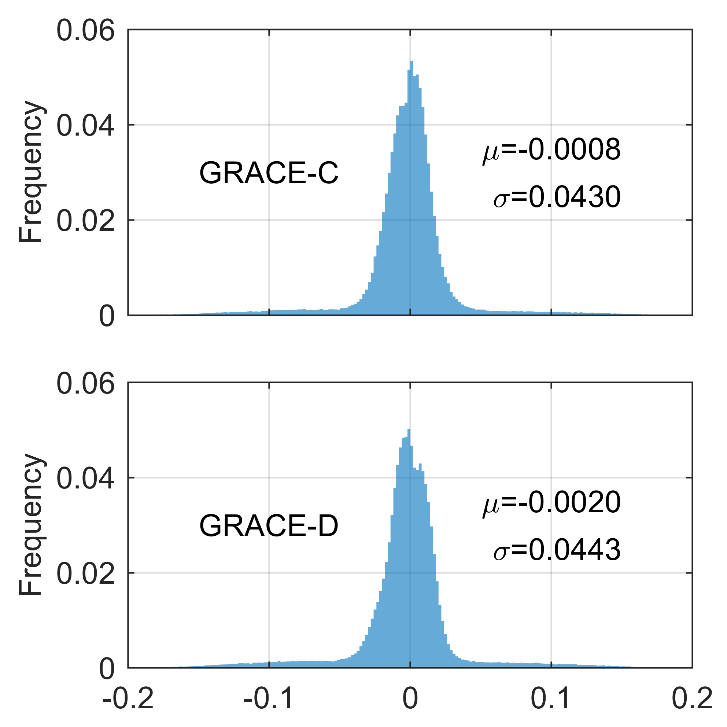
图7 GRACE-C和GRACE-D在弹性功率开启期间的∆DR分布
为评估所提策略的性能,设计四种方案进行试验和比较,具体见表2。S1为采用RTKLIB中的周跳探测方法;S2是在有无弹性功率期间采用确定的∆ΦGF阈值检测模糊度连续性;S3是在弹性功率开启期间检测到SNR跳变时则进行模糊度初始化;S4为S2和S3的结合,当S2或S3检测到模糊度不连续时,则对模糊度初始化。
表2 设计的4种定轨策略
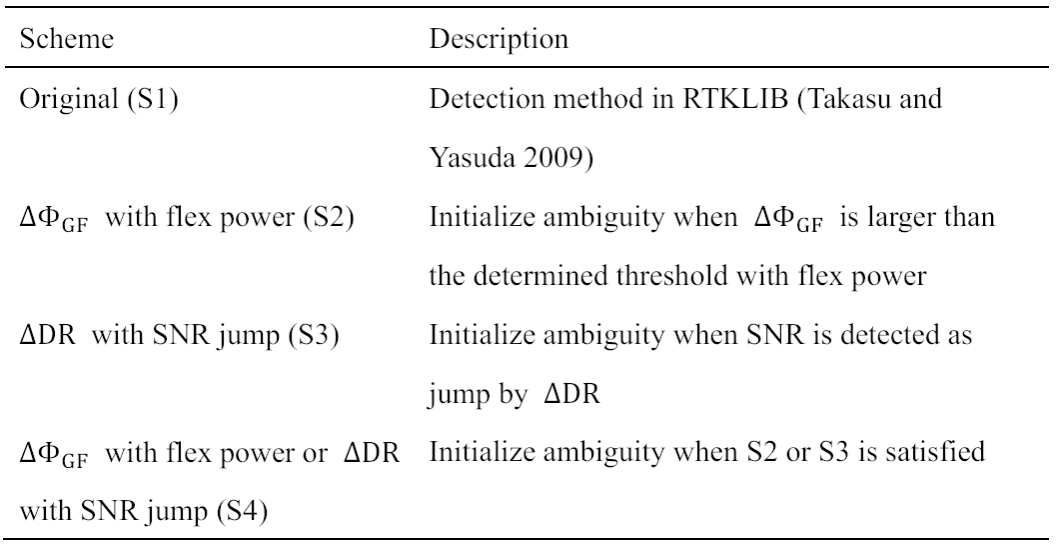
图8为四种策略下的定轨误差序列。使用原始方案(S1),切向、法向和径向误差的RMS分别为4.29、5.18和3.99 cm。相较于S1,S2策略在三个方向上的改善率分别为35%、58%和33%,S3的改善率分别为19%、17%和11%。当同时考虑S2和S3,定轨精度得到进一步提升,三个方向的定位误差分别为2.67、1.92和2.54 cm。
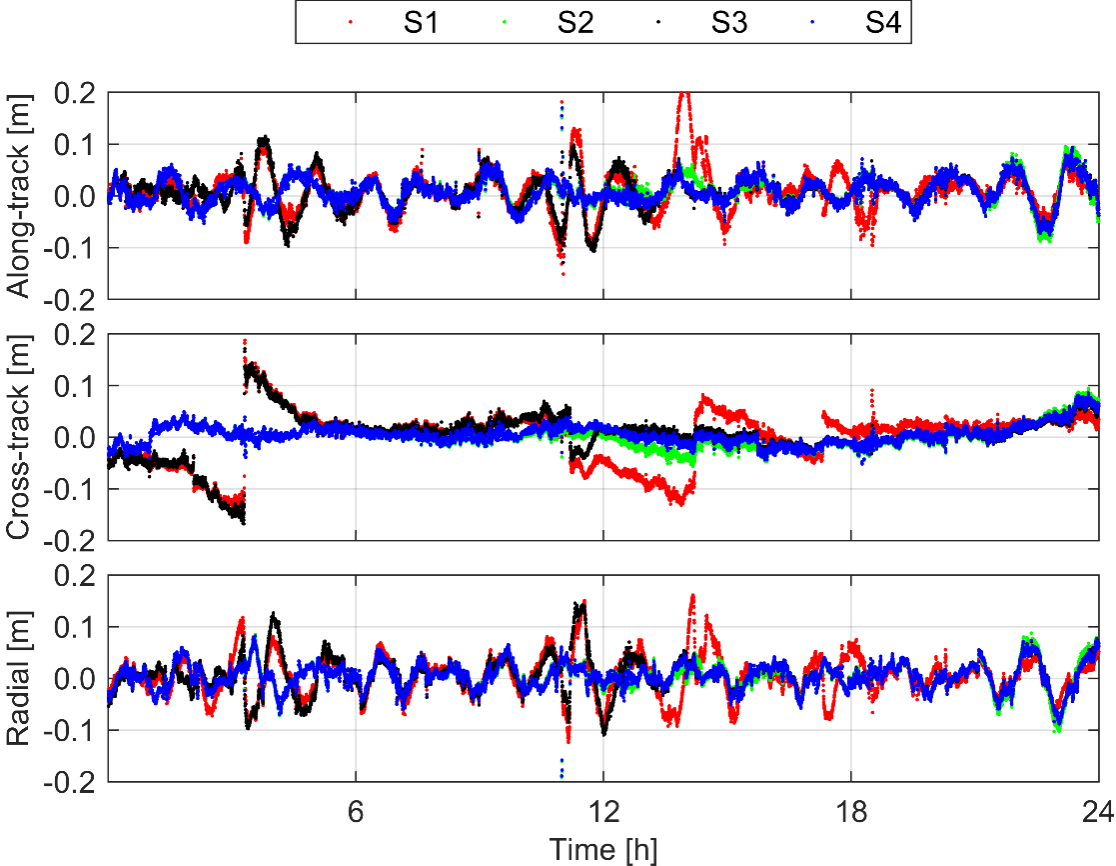
图8 4种策略下GRACE-C在2020年2月16日的定轨误差序列
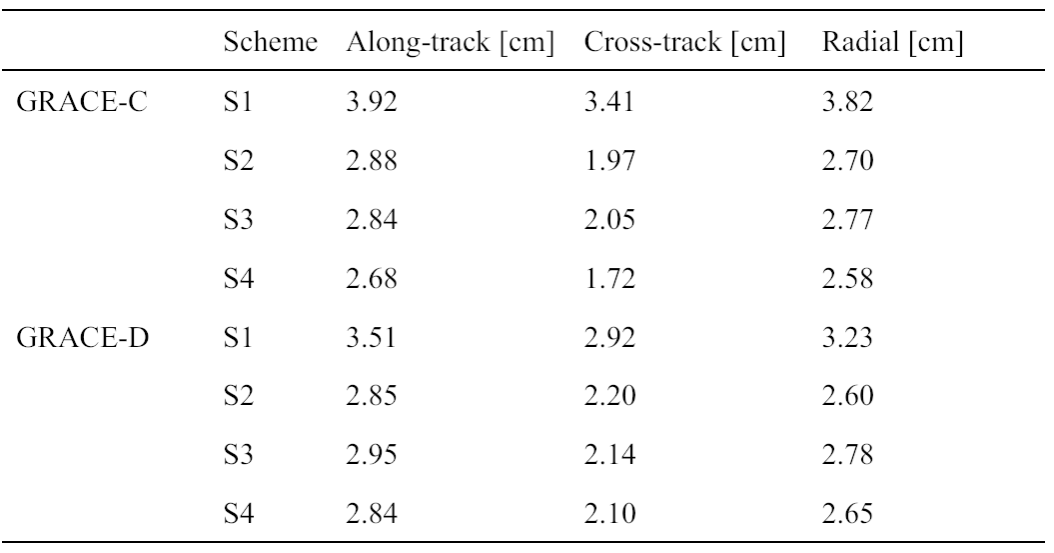
为综合评估所提策略的提升效果,采用30天GRACE-FO数据进行测试,结果如表3所示。对于GRACE-C,S1策略在切向、法向和径向误差的RMS分别为3.92、3.41和3.82cm,而S2的则分别为2.88、1.97和2.70cm,分别改善了26%、42%和29%。与S1相比,S3策略在三个方向的改善率为27%、40%和27%。整体上,S4策略的结果最优,三个方向上的误差分别为2.68、1.72和2.58cm。相较于S1、S2和S3,S4策略的3D RMS分别减小了36%、7%和8%。对于GRACE-D,S4策略在三个方向上的误差分别为2.84、2.10和2.65cm。相较于S2和S3,S4策略的3D RMS分别减小了1%和4%。
表3 4种策略下GRACE-FO的定轨误差RMS
为进一步评估所提策略的改善效果,采用卫星激光测距(SLR)检核几何法定轨的精度。图9展示了S1和S4策略下GRACE-C和GRACE-D的SLR残差序列。可见,S4策略的SLR残差基本小于10cm,而S1策略下GRACE-C和GRACE-D的残差有4.81%和5.03%大于10cm。表4统计了GRACE-FO的SLR残差RMS。S1策略下GRACE-C和GRACE-D的SLR残差RMS均大于4.5cm,而S4策略下二者分别为3.10和4.07cm,分别减小了34%和14%。以上结果验证了本文所提方案在弹性功率开启期间对GRACE-FO定轨的改善效果。
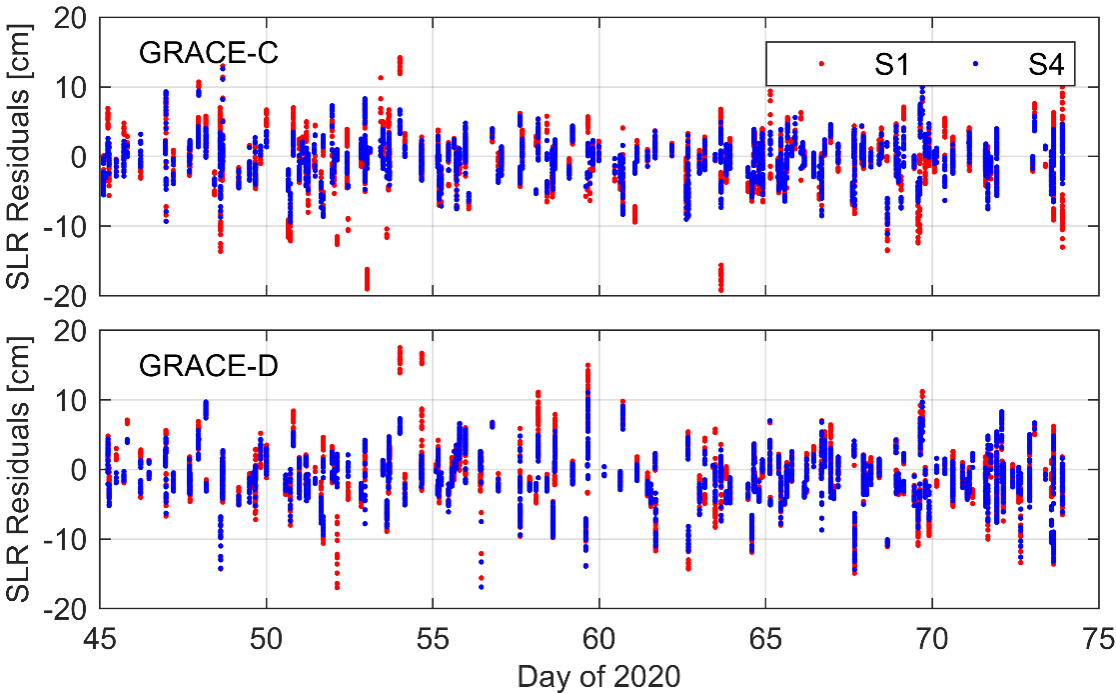
图9 S1和S4策略下GRACE-FO的SLR残差序列
表4 GRACE-FO几何法轨道的SLR残差RMS
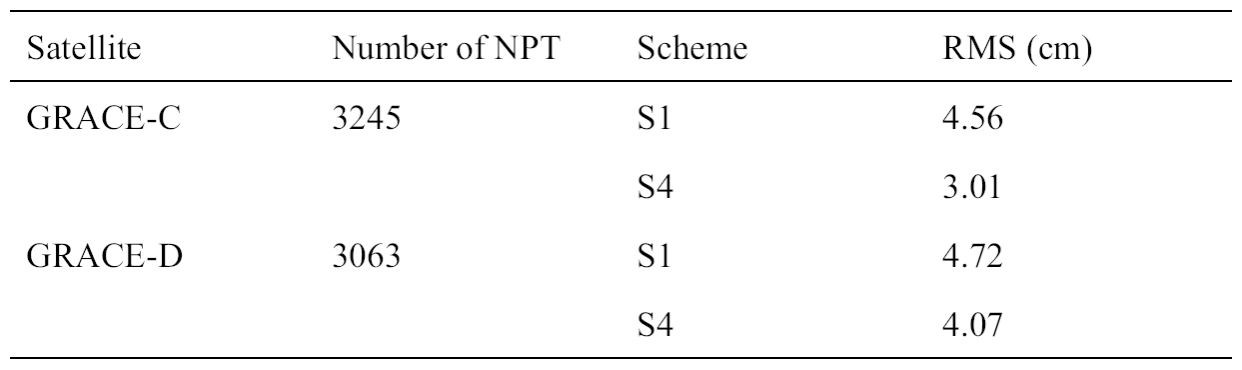
本文提出了一种顾及弹性功率影响的GRACE-FO几何法定轨策略,对星载数据的∆ΦGF和SNR进行分析,并利用以上两种检验量探测弹性功率开启期间模糊度参数的连续性。结果表明,同时考虑弹性功率下的∆ΦGF和SNR跳变(S4,所提策略),几何法定轨结果最优,GRACE-C和GRACE-D的3D定轨误差分别为4.10和4.42cm,相较于S1、S2和S3分别减小了(36%,7%,8%)和(21%,1%,4%)。采用SLR数据进行检核,所提策略下GRACE-C和GRACE-D的SLR残差RMS分别为3.10和4.07cm,相较于原始策略分别改善了34%和14%。上述结果证明了所提策略在弹性功率开启期间对GRACE-FO定轨的有效性。
A strategy to determine GRACE-FO kinematic orbit during the activation of flex power | GPS Solutions



