无人智能载体安全工作依赖于精准的位置和姿态信息。目前基于全球导航卫星系统(GNSS)与惯性导航系统(INS)的组合导航技术是行业内的首选定位定姿方案。但当卫星信号受到长时强干扰时,INS误差累积将导致GNSS/INS组合系统的精度快速发散。尽管引入其他传感器(如雷达、相机、里程计等)是一种解决手段,但这些传感器高度依赖基础设施,且只能提供空间相对位姿信息,依然面临长期发散风险。作为唯一能够提供绝对位姿的信息源,GNSS在多源融合定位中起着不可替代的作用。如何解决干扰场景下GNSS信号个数少、质量差的难题具有重要现实意义。
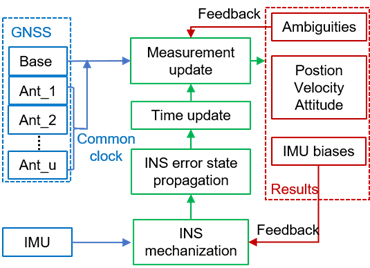
同济GNSS团队近期提出了一种顾及时钟特性的多天线GNSS/INS组合方法,通过多个天线的原始观测值及不同天线间的时钟约束挖掘潜在的GNSS信息,从而实现GNSS/INS组合系统自身增强。在国家杰出青年科学基金等项目的资助下,研究成果“Enhanced Land Vehicular GNSS/INS Combined System by Using Multiple-antenna with Common Clock”在车辆领域著名期刊《IEEE Transactions on Vehicular Techology》上发表,论文第一作者为团队博士生陈广鄂,通讯作者为团队负责人李博峰教授。
01论文主要内容
1. 建立了任意频点、任意天线个数的有/无时钟约束的多天线GNSS/INS统一模型。
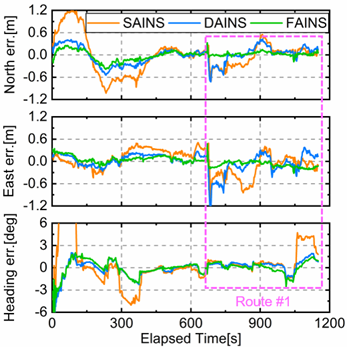
2. 以单/双/四天线GNSS/INS组合模型(S/D/F-AINS)为例,结合半仿真数据(Test #1)、实测数据(Test #2)验证了多天线GNSS/INS组合导航的有效性。实验结果表明,多天线的加入能够有效改善复杂环境下的定位定姿精度。在Test #1和#2的复杂路段,相比于SAINS,DAINS和FAINS的水平位置均方根误差(RMSE)分别降低42.8/67.8%和45.1/52.1%。
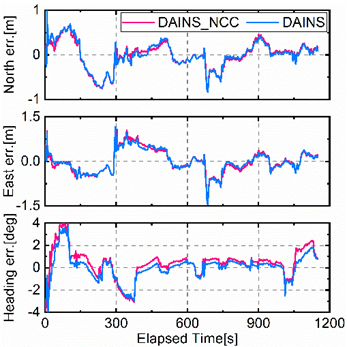
3.以双天线GNSS/INS组合模型为例,详细分析了时钟约束的贡献。实验结果表明,考虑时钟约束,在显著加快航向角收敛的同时,也能有效改善组合导航系统在长期GNSS不佳路段下的航向精度。
02 总结与展望
自主定位定姿技术推动了众多行业发展,一直是业界的关注热点。以GNSS、INS为核心的多源融合导航技术被普遍认为是自主定位定姿技术的发展趋势。然而,更多的传感器意味着更高昂的成本,这对普通用户而言无疑是一笔巨大负担。在未出现颠覆性技术前,一味堆叠传感器似乎并不能解决全场景精密定位定姿问题。结合具体行业需求,深入挖掘传感器性能极限,选择恰当的传感器进行辅助,更应成为精密自主定位定姿领域的关注重点。
Enhanced Land Vehicular GNSS/INS Combined System by Using Multiple-Antenna With Common Clock | IEEE Journals & Magazine | IEEE Xplore



