前言:
随着低轨星座的快速建设,低轨增强全球导航卫星系统(LeGNSS)成为目前GNSS应用与服务的一大研究热点,尤其是精密单点定位快速收敛方面。为综合评估低轨增强精密单点定位性能,同济大学GNSS团队开展了基于低轨导航卫星系统增强的无电离层组合(IF),非差非组合(UDUC)和电离层加权模型(IW)三种模型以及有无系统间偏差(ISB)约束的精密单点定位研究。研究成果以“LEO enhanced GNSS (LeGNSS) Precise point positioning with emphasis on model comparison”为题发表于国际期刊《Advances in Space Research》,论文第一作者为葛海波副教授,通讯作者为李博峰教授。该研究受到国家自然科学基金、上海市科委科技创新计划等科研项目资助。
图1论文发表结果
论文主要内容:
为评估LeGNSS精密单点定位的性能,选取8个全球分布的MGEX测站,如图2所示。GPS,Galileo和BDS为各测站的真实数据,LEO观测数据根据同济大学GNSS团队优化的低轨星座进行模拟。该星座由3个walker星座组成,卫星配置参数(i:t/p/f)分别为90°:60/06/1,60°:90/06/1和35°:90/06/1(详细优化研究可参考Ge H, Li B, Nie L, Ge M, Schuh H (2020). LEO constellation optimization for Leo enhanced Global Navigation Satellite System (LeGNSS). Adv Space Res 66(3): 520-532)。
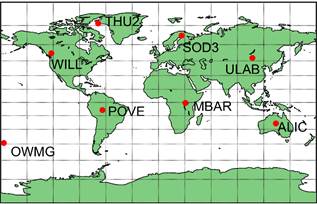
图2 MGEX测站分布
分析各测站不同系统组合的卫星跟踪个数和几何构型(PDOP),结果如图3所示。在加入低轨卫星后,G\L和G\E\C\L的卫星跟踪个数分别大于15和30颗,相应的PDOP值分别小于1.5和1.0。与GPS单系统和G\E\C相比,低轨卫星将PDOP分别减小38%和22%。此外,各测站跟踪到的低轨卫星约为8颗,个数相近,体现了优化的低轨卫星星座使可视低轨卫星个数沿纬度均匀分布的特性。
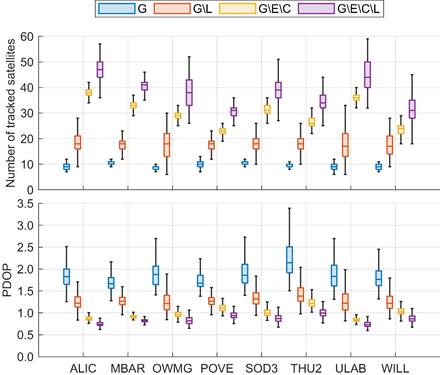
图3卫星跟踪个数和PDOP箱型图
图4展示了THU2测站在静态和动态定位模式下IF,UDUC和IW三种模型的定位误差。收敛条件为E,N和U三方向误差均小于10cm并持续10分钟。在PPP收敛后,GPS单系统在IF,UDUC和IW的3D误差分别为8,11和11mm,G\E\C的3D误差分别为8,9,9mm。低轨卫星将GPS单系统和G\E\C在IF,UDUC和IW模型下的3D定位误差分别改善了(38%,45%,45%)和(38%,33%,33%)。
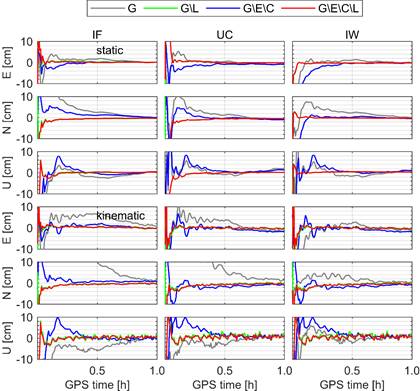
图4 THU2测站在不同系统组合,定位模式和定位模型下的误差序列
图5给出了THU2测站采用ISB约束后IF,UDUC和IW模型下的定位误差。由图可见,ISB约束对IF和IW模型的改善效果较为明显,G\L的IF和IW模型定位误差分别减小了40%和17%,G\E\C\L的则分别减小了40%和33%。在动态定位模式下,ISB约束将G\L在IW模型下的定位误差由12mm减小至8mm。
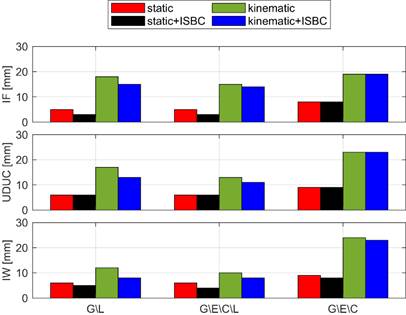
图5 THU2测站有无ISB约束的3D定位误差
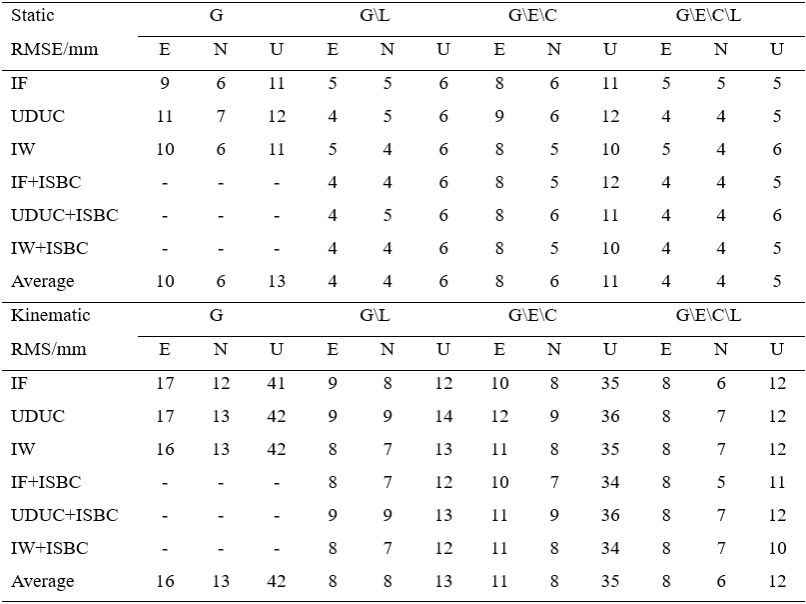
表1列出了所选测站在不同系统组合、定位模式和定位模型下的误差统计结果。由表可知,G\L和G\E\C\L在E,N和U方向的静态定位误差均小于1cm,而U方向的动态定位误差大于1cm。相较于GPS单系统和G\E\C,低轨卫星分别将ENU方向的静态定位误差提升了(60%,33%,54%)和(50%,33%,54%)。
采用ISB约束后,G\L的IF和IW模型的静态定位误差为8mm,相较于无ISB约束提升了11%,而UDUC模型没有明显改善。在动态模式下,ISB将G\L和G\E\C\L在IF,UDUC和IW模型的定位误差分别改善了(6%,5%,6%)和(13%,6%,6%)。
表1不同系统组合,定位模式和定位模型下的误差统计
为评估不同LeGNSS PPP模型的收敛时长,分别在0:00,6:00,12:00和18:00初始化。图6展示了THU2测站在初始化后30分钟内的定位误差序列。G\L和G\E\C\L在IF,UDUC和IW模型下的收敛时长分别为(1.1,1.4,0.9)和(1.1,1.4,0.8)min,相较于GPS单系统和G\E\C分别改善了(84%,81%,88%)和(82%,79%,86%)。动态模式下,IW的收敛时长最短,约为1.3分钟。
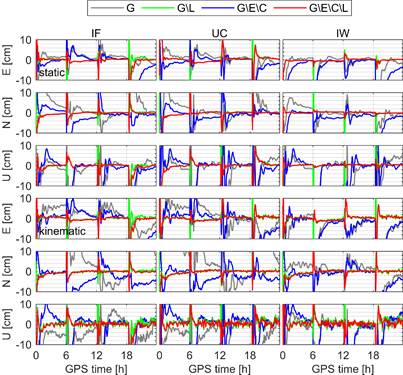
图6 THU2测站在0:00,6:00,12:00和18:00初始化后30分钟的误差序列
图7给出了THU2测站有无ISB约束的收敛时长。由图可知,采用ISB约束后,G\L在IF,UDUC和IW模型的静态收敛时长分别减少了8%,7%和11%,动态模式下则分别缩短了7%,6%和9%。对于G\E\C\L,ISB约束将三种模型的静态收敛时长分别缩短7%,6%和15%。
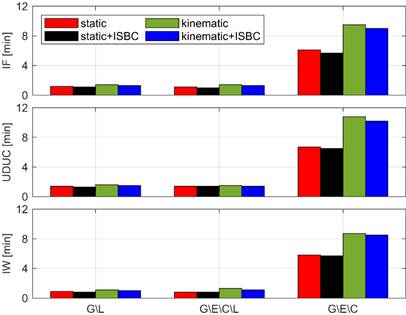
图7 THU2测站有无ISB约束的收敛时长
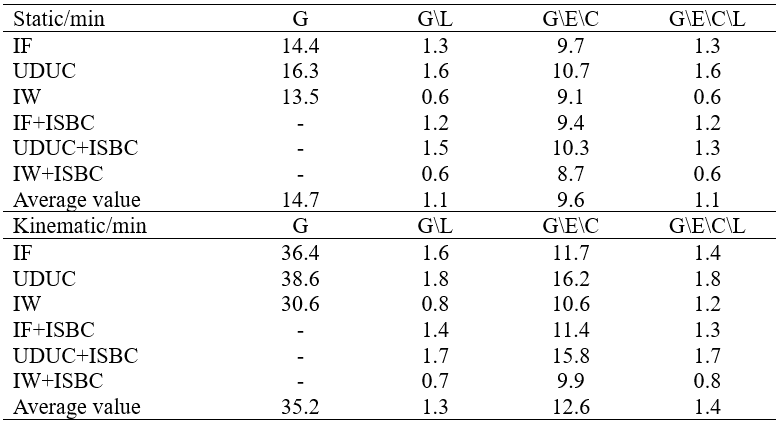
表2列出了所选测站的在不同系统组合,定位模式和定位模型的收敛时长。加入低轨卫星后,G\L和G\E\C\L的平均收敛时长短于1.5min。低轨卫星将GPS单系统和G\E\C在IF,UDUC和IW模型下的收敛时长分别缩短了(91%,90%,95%)和(87%,85%,93%)。相较于IF和UDUC模型,IW模型的收敛时长最短。
采用ISB约束后,G\L和G\E\C\L在IF和UDUC的静态收敛时长减小了0.1-0.3min,而IW模型没有明显改善。在动态模式下,ISB约束将G\L和G\E\C\L在IF,UDUC和IW模型下的平均收敛时长缩短了(13%,5%,13%)和(7%,5%,33%)。
表2不同系统组合,定位模式和定位模型下的收敛时长
总结与展望:
本文基于模拟LEO数据详细评估了LeGNSS PPP在不同系统组合,定位模型和定位模型下的性能。结论如下:1.加入低轨卫星后,PDOP减小至0.5-1.5,与GPS单系统和G\E\C相比,低轨卫星将PDOP分别改善了38%和22%;2.低轨卫星可将E,N和U方向的静态定位误差改善约50%,30%和50%,动态误差改善约35%,30%和67%,IF,UDUC和IW模型的定位精度相当;3.低轨卫星可将收敛时长缩短至1.0min左右,相较于GPS单系统和G\E\C改善了90%。IW模型的收敛时长最短,其次分别为IF和UDUC模型。此外,ISB约束在收敛时长方面的改善范围在1.0min内。
GNSS团队介绍:
依托创新的数据处理理论成果基础,经过多年科研攻关,TJGNSS团队在卫星精密定轨、室内外高精度定位、定姿、建图等领域取得了一系列重要成果,并主持完成了多项国家和省级研究课题。研究涵盖了GNSS及低轨卫星精密轨道与钟差确定、高精度轨道与钟差智能预报、低轨增强导航卫星系统、低成本终端GNSS高精度定位、长距离高精度RTK、Ademos毫米级实时变形监测系统、同济北斗分析中心精密轨道产品、GNSS/UWB/VIO无缝定位、GNSS/INS/Lidar定位与建图、5G/Wifi/WUB/ibeacon /bluetooth/地磁多源融合室内定位等多个方向。旨在满足各类终端、各种场景下、米级至毫米级的定位需求。目前,团队研究已成功应用于边坡/井下形变监测、园区人员定位、沙漠/远海高精度定位、车辆导航、精密定轨等领域,我们热忱欢迎与各界合作并交流经验。
论文信息:
Ge H, Meng G, Li B (2024) LEO enhanced GNSS (LeGNSS) Precise point positioning with emphasis on model comparison. Advances in Space Research.
点击下方阅读原文获取全文信息
https://doi.org/10.1016/j.asr.2024.06.006



