平面是人造场景中常见的几何特征,在点云配准和三维重建中有着广泛应用。自动驾驶和机器人等领域通常采用机械式激光雷达,这类激光雷达的扫描方式使得获取的点云具有稀疏且密度不均的特性,为平面提取带来了挑战。为了获得可靠的平面提取结果,需要充分利用传感器的扫描方式。同济大学GNSS团队基于由点到线再到平面的框架,提出了一种面向机械式激光雷达的平面提取新方法。研究成果以“Noise model based line segmentation for plane extraction in sparse 3D LiDAR data”为题发表于国际期刊《IEEE Transactions on Geoscience and Remote Sensing》,论文第一作者为博士研究生何林坤,通讯作者为李博峰教授。该研究受到国家自然科学基金、上海市科委科技创新计划等科研项目资助。
机械式激光雷达具有多个激光束同时绕雷达Z轴旋转扫描(图2)。根据每个点的方位角和高度角可以轻松地将一帧点云投影为一张深度图。此时,具有相同列号的点可视为分布在经过雷达Z轴的某一平面上。在欧式空间中,两平面相交将形成直线,可以此来判断位于平面上的点。
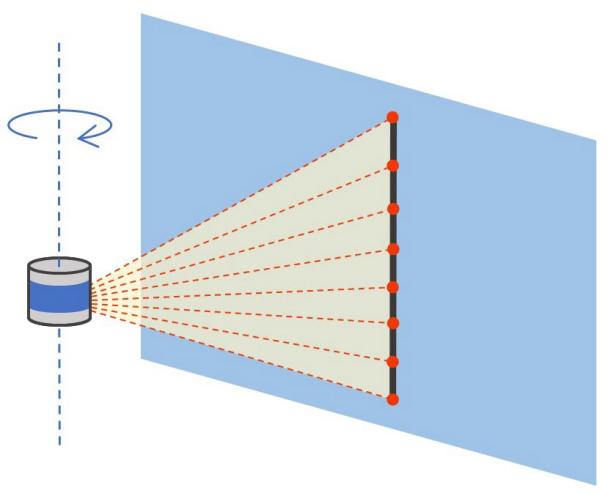
图2激光雷达扫描方式
如图3所示,本文提出的方法主要包括三个步骤。首先,在将点云投影至深度图后逐列进行线段分割;随后根据定义的线段相邻关系获得线段序列,并将道格拉斯-普克算法拓展至三维,用于从线段序列中提取平面;最后,利用点层面的区域增长以及平面合并进一步完善结果。
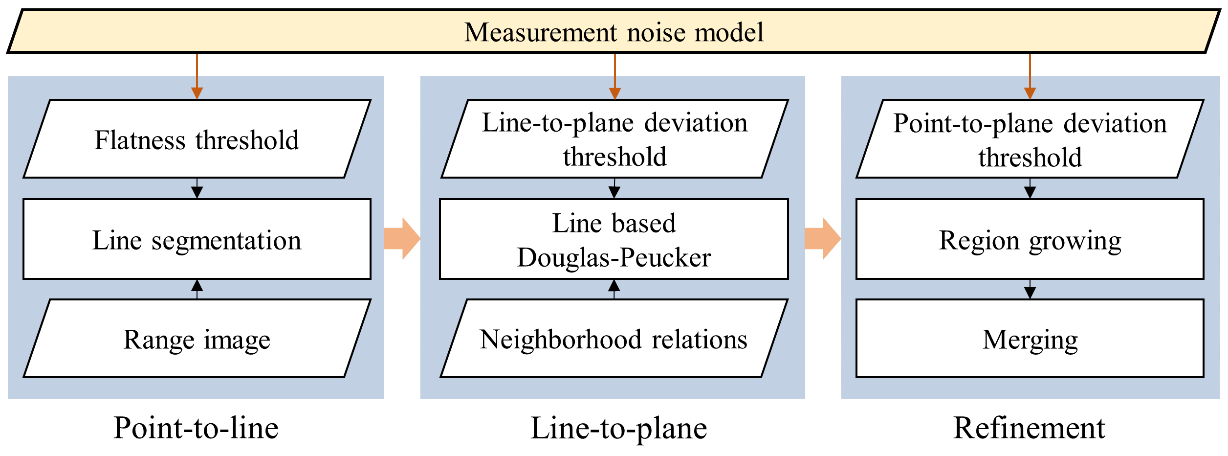
图3平面提取方法示意图
值得注意的是,为了合理确定该方法中的主要参数,文章对激光雷达观测噪声的统计特性进行了建模。一般认为激光束的扫描方向由雷达内部装置精确控制,忽略其误差。而测距值则受到高斯噪声的影响,并且噪声水平与激光束的入射角有关。如图4所示,测距噪声与入射角呈正相关,本文采用类Sigmoid函数来描述这两者之间的关系。在由点到线的过程中,我们需要确定同一列上连续的三点是否共线。在由线到面的过程中,也需要确定某一线段是否位于平面上。这些过程中都将采用建立的噪声模型以自适应确定阈值。
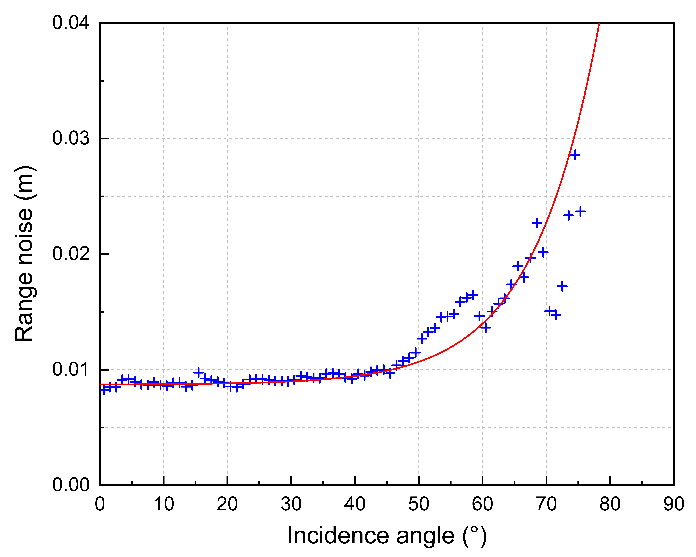
图4入射角-测距噪声散点图
为了验证该方法的有效性,模拟了不同二面角以及遮挡情况下的点云用于测试,并根据本文的测距噪声模型添加了人工噪声。如图5所示,本文的方法能够有效区分不同平面,同时也能在遮挡存在时恢复出完整的平面。
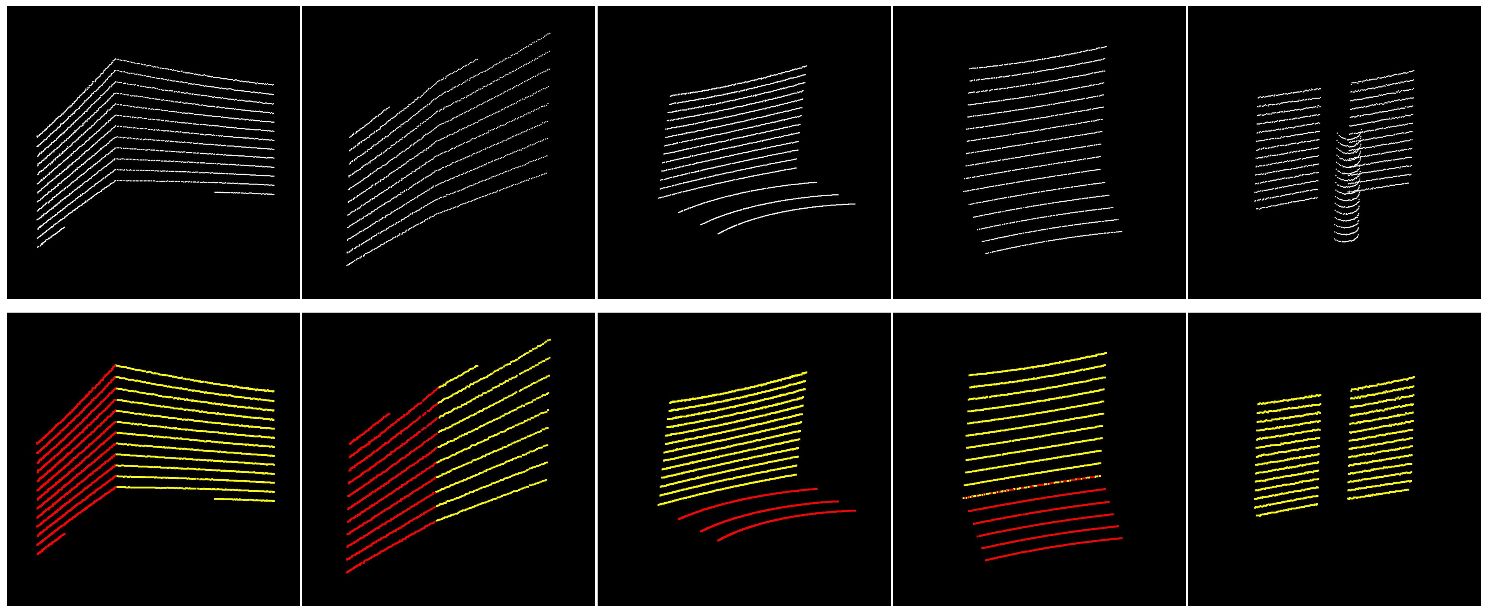
图5模拟数据测试结果
另一方面,在不同型号的激光雷达上进行了实际测试,并与其他平面提取方法进行了比较。测试环境包括了室内、城市、校园等多种场景。从图6-8中可以看出,本文提出的方法(Line Based Douglas-Peucker,LBDP)能够完整地提取出环境中的大多数平面,并且优于同类方法。
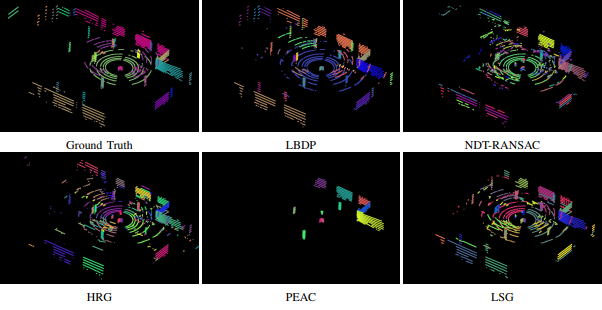
图6 Velodyne VLP-16数据测试结果
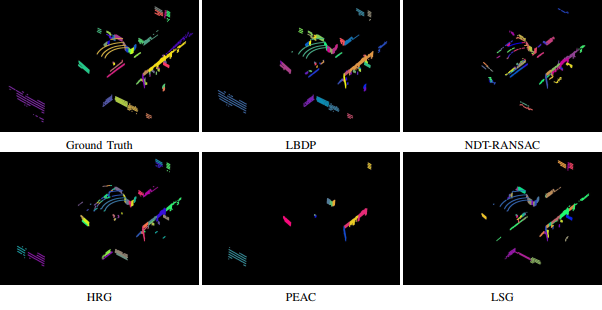
图7 Velodyne HDL-32E数据测试结果
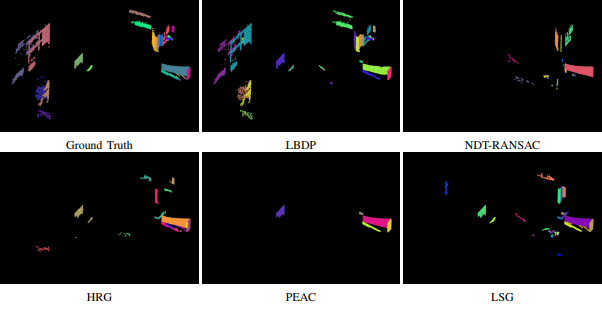
图8 Ouster OS1-64数据测试结果
此外,还利用了480帧32线雷达数据对算法效率进行了验证(图9)。LBDP以线段作为主要的处理对象,具有较高的效率,平均运行时间为15.6 ms。激光雷达的采样频率一般为10Hz,因此本文的方法足以满足实时处理的要求。
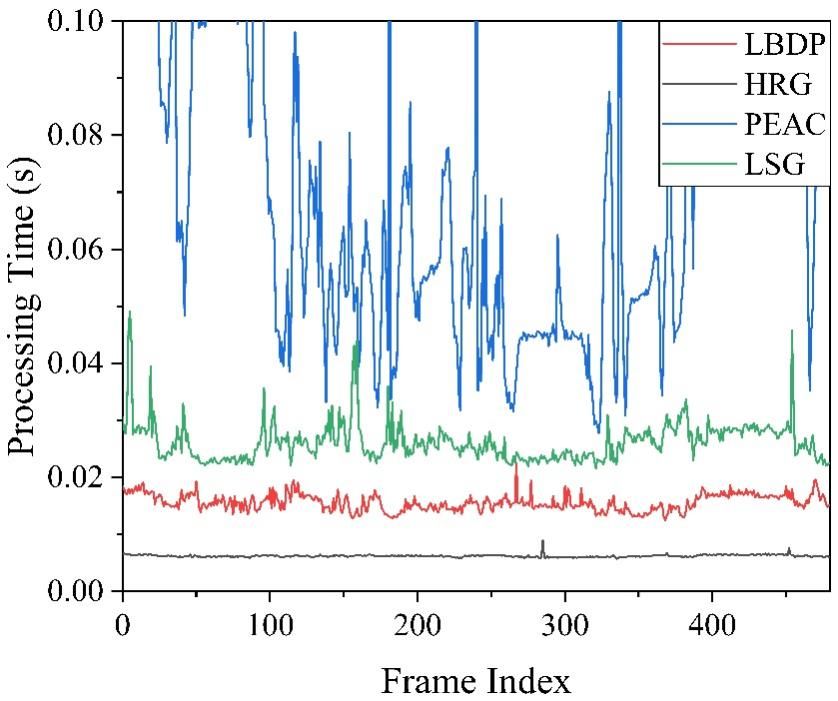
图9算法运行时间
本文对激光雷达观测噪声的统计特性进行了建模,并基于此提出了快速、准确的平面提取方法。该方法在不同场景的测试中表现出了稳定且优异的性能。作为一类基础的几何特征,该方法提取出的平面可应用在点云处理的多个环节中,例如内外参标定、配准以及建模等。更具体地,机械式激光雷达通常安装在智能车辆和机器人上,因此本文提出的方法可助力于激光里程计以及同步定位与建图(SLAM)等相关技术。此外,本文目前采用的测距噪声模型还较为简单,距离、反射强度等因素仍有待进一步考虑。



