高精度定位技术在国家战略实施以及经济社会民生发展中扮演着至关重要的角色。继北斗三号系统建成后,我国开启了综合定位、导航、授时(PNT)体系建设,旨在满足多场景泛在智能化的高精度位置服务。在上海市2022年发布的《关于本市推进信息空间产业高质量发展的实施意见》中,明确大力支持高精度定位相关产业的发展。近年来,智能交通、智慧城市、智慧农业等领域纵深发展,相关行业对高精度定位的需求也从单一场景转向了全场景,对现有的高精度定位技术提出了新挑战。目前,基于全球卫星导航系统(GNSS)和惯导(IMU)的组合导航技术被广泛使用。然而,GNSS在严重遮挡或室內等非暴露空间中无法应用,IMU受误差累积导致定位迅速发散。为了实现全场景、高精度、高稳定、高可信的定位效果,迫切需要发展新的定位技术。
鉴于现有高精度定位技术的局限性,以实际行业需求为导向,李博峰教授带领的TJGNSS团队深入开展多传感器融合的室内外无缝高精度定位技术,历时6年的研究,团队通过不断改进和优化算法,深挖各类传感器的极限;在此基础上搭建了集成GNSS、IMU、相机、UWB和激光雷达的多传感器平台,研发了多传感器融合高精度定位软件系统(Positioning Indoor and Outdoor NAvigation System, 简称PIONAS)。近日,该PIONAS的初步论文成果Tightly Coupled Integration of GNSS/UWB/VIO for Reliable and Seamless Positioning在智能交通领域国际TOP期刊《IEEE Transactions on Intelligent Transportation Systems》上发表,论文第一作者为博士生刘天霞,通讯作者为导师李博峰教授。

论文主要内容
为实现室内外复杂场景下的高精度无缝定位,PIONAS系统采用了GNSS、IMU、双目相机和UWB四种传感器融合的解决方案。在室外复杂环境中,采用GNSS+双目VIO定位,以保证GNSS长期中断时的高精度定位。在室内等非暴露场景中(如:地下停车场),通过UWB系统引入绝对位置基准,从而校正VIO累积误差、实现高精度室内定位。在多源融合算法方面,与传统基于GNSS及UWB定位结果的松组合算法不同,PIONAS采用基于多传感器原始数据的紧组合模型,从函数模型和随机模型层面融合。设计了能够融合GNSS伪距和相位、UWB TDOA、IMU加速度和姿态、以及基于特征点的双目视觉定位的多源融合滤波框架。论文的主要贡献如下:
(1)设计了GNSS、IMU、相机和UWB四种传感器融合的函数模型和随机模型框架;
(2)提出了复杂环境下视觉-惯性里程计(VIO)辅助GNSS/UWB的质量控制方法;
(3)自主研发了PIONAS软硬件平台,并开展了室内外复杂场景下的测试与分析。
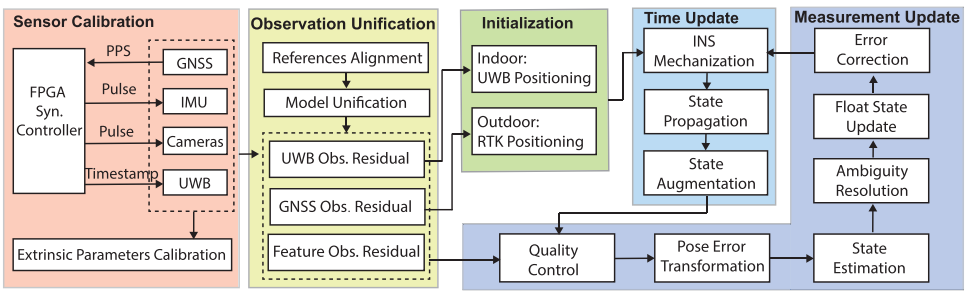
图1 GNSS/UWB/VIO多源融合算法框架
为了评估PIONAS系统中算法的性能,在同济大学四平路校园内进行了室内外定位测试。测试包括多种不同场景,如:开放区域、树木遮挡、建筑物遮挡的校园道路,地下停车场,以及连接室外和停车场的长通道等。测试在行人和车辆活动频繁的工作日白天进行。
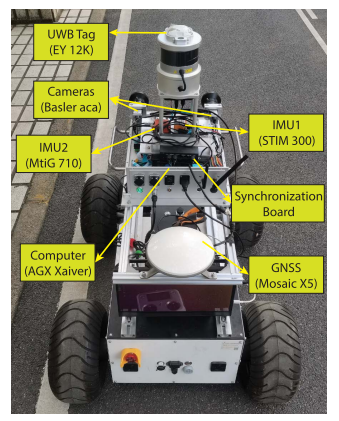
图2 PIONAS多源传感器硬件集成平台
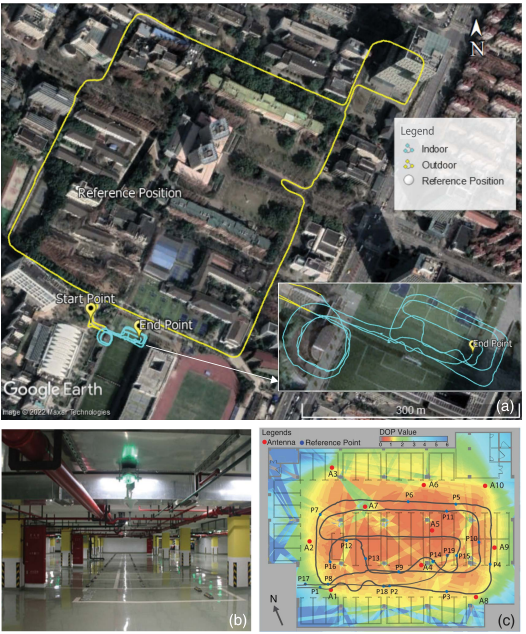
图3 实验环境。a: 实验路线,b: 室内测试场景;c: UWB标签布局及室内DOP值
在室外环境测试中,对比了GNSS+VIO松组合和紧组合的定位效果差异,并分析了引入视觉后的定位性能提升。结果表明,相比于GNSS+VIO松组合,紧组合的平面位置、高程的精度提升了17.38% 和37.71%,航向角的精度从4.7°降低到了0.7°。相比于GNSS+IMU紧组合,GNSS+VIO紧组合的水平、高程定位精度分别提高了48.50% 和76.03%,表明在复杂环境下引入视觉信息能有效抑制IMU的误差累积。
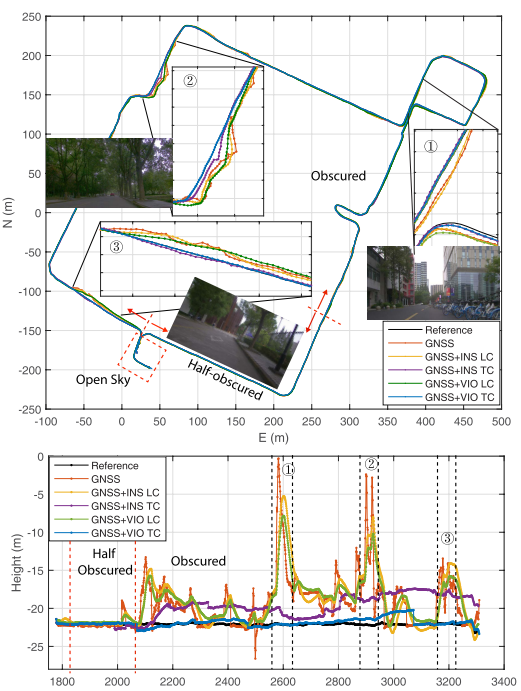
图4 室外场景各方法平面、高程定位精度对比(LC:松组合,TC:紧组合)
在室内环境测试中,对比了VIO、UWB、UWB+VIO松组合和紧组合的定位效果差异。四种方案水平定位精度分别为3.312 m, 0.117 m, 0.094 m 和0.077 m。说明若无绝对基准信息辅助,单独使用VIO在室内无法维持长时间的高精度定位,而引入UWB后,可有效改正VIO累积误差,实现8cm的室内高精度定位。此外,借助VIO的短期高精度递推结果,UWB+VIO紧组合相比于松组合实现了更好的非视距误差信号(NLOS)的识别与剔除。
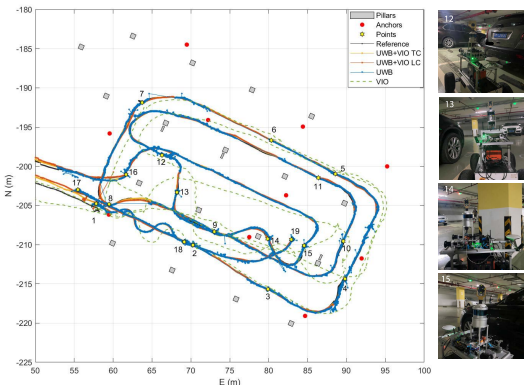
图 5 室内场景各方法平面定位精度对比
总结与展望
全场景的高精度、高稳定、高可信的定位技术能够为智能交通、自动驾驶等产业提供重要保障,是近年来行业研究的热点问题。PIONAS系统中涉及到课题组在函数模型弹性构建、随机模型最优融合、非模型化误差精准识别与处理等关键核心算法。
依托创新的数据处理理论成果基础,经过多年科研攻关,TJGNSS团队在室内外高精度定位、定姿、建图等领域取得了一系列重要成果,并主持完成了多项国家和省级研究课题。研究涵盖了低成本终端GNSS高精度定位、长距离高精度RTK、Ademos毫米级实时变形监测系统、同济北斗分析中心精密轨道产品、GNSS/UWB/VIO无缝定位、GNSS/INS/Lidar定位与建图、5G/Wifi/UWB/Ibeacon /blueteeth/地磁多源融合室内定位等多个方向。旨在满足各类终端、各种场景下、米级至毫米级的定位需求。目前,团队研究已成功应用于边坡/井下形变监测、园区人员定位、沙漠/远海高精度定位、车辆导航等领域,我们热忱欢迎与各界合作并交流经验。
扫描二维码关注我们




