平面是对物体表面的一种直观的描述方式,作为几何特征被广泛应用在激光(惯性)里程计中。现有方案通常以最近邻搜索或体素化的方式构建局部平面,难以获取完整的平面信息(如墙面),从而导致平面拟合精度低以及引入大量冗余约束的问题。尽管已有方案显式地提取全局平面用于定位,但它们未能充分利用点云的全部信息,往往只适用于室内场景。针对上述问题,同济大学GNSS团队从数据关联和地图表示等方面入手,系统性地将全局平面融入到激光惯性里程计中,实现平面充足/缺少全场景下的高精度定位建图。
该研究成果以“PLACE-LIO: Plane-Centric LiDAR-Inertial Odometry”为题发表于国际期刊《IEEE Robotics and Automation Letters》,论文第一作者为博士研究生何林坤,通讯作者为指导老师李博峰教授。该研究受到国家自然科学基金、上海市科委科技创新计划等科研项目资助。
1. 提出了平面占据的体素格网用于地图表示。在每个体素中,除了存放规定数量的点以外,我们还记录了与之相交的全局平面的索引,这使得本文的地图能够实现快速的平面匹配以及最近邻搜索。我们利用两个哈希表分别存放非空体素以及全局平面信息,维持地图的稀疏性。
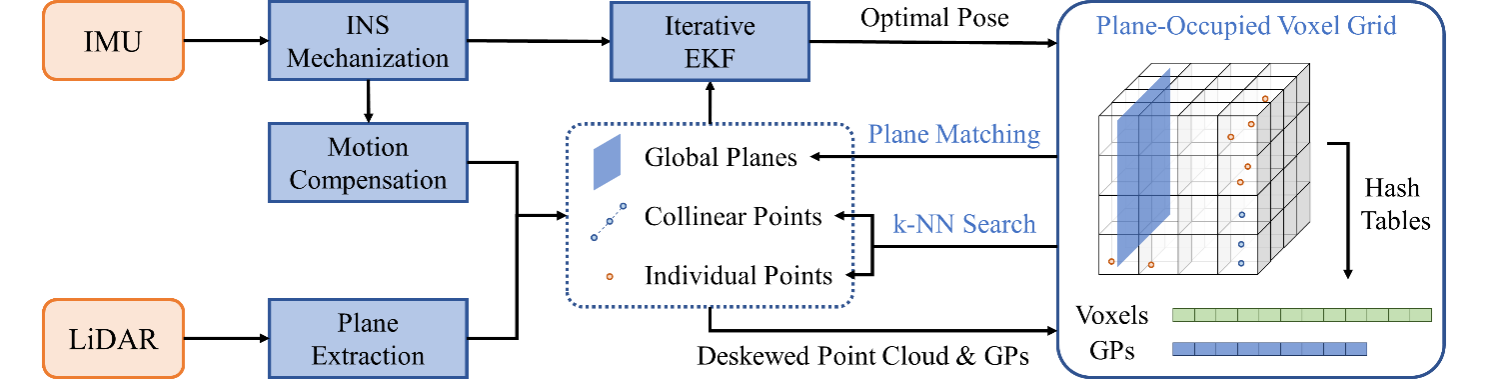
图1 算法流程图
2. 构建了层次数据关联方案。基于平面分割结果,本文将每帧点云中的点标记为全局平面、共线点以及独立点,并分别采用三种类型的约束(面-面、点-面以及点-点)以充分利用每帧点云信息。伪代码如图2所示。
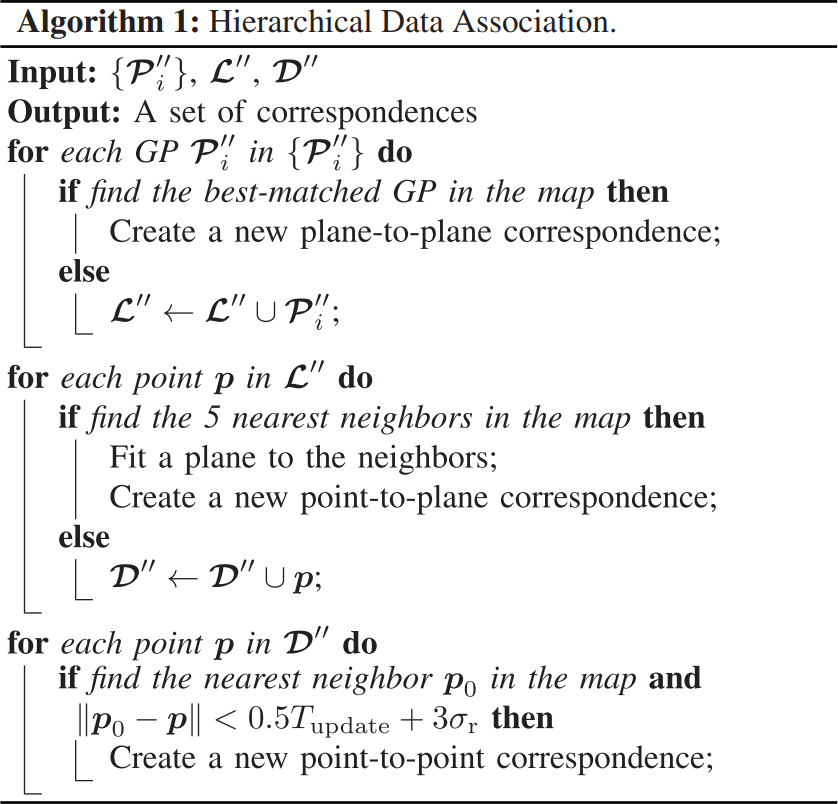
图2 层次数据关联
3. 在多个开源数据集(UrbanNav、M2DGR)上进行了大量测试,涵盖了平面充沛的城市环境以及平面缺少的校园环境。结果显示,在绝对轨迹误差(ATE)和相对轨迹误差(RTE)两个精度指标下,本文提出的方法达到了先进水平,证明了引入全局平面对位姿估计的有效性。

图3 在UrbanNav数据集下的建图效果展示
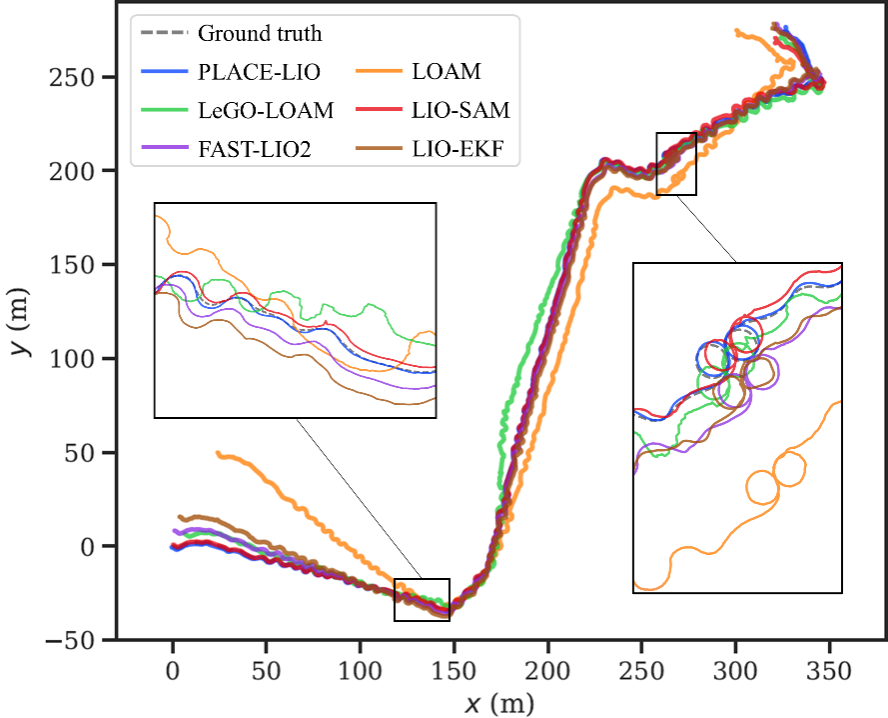
图4 在M2DGR数据集street_07序列下的
定位轨迹对比
本文聚焦于将平面提取结果整合至定位建图过程,提出了以全局平面为核心的激光惯性里程计(PLACE-LIO)。实验结果表明,全局平面可显著提升里程计在结构化环境中的精度,PLACE-LIO能够实现约0.4%的低漂移。另一方面,本文的方法并不完全依赖于全局平面,在平面缺少的环境中与主流方法对比仍然具备较强的竞争力。但值得注意的是,平面提取本身也会带来一定的计算成本,而这在高度非结构化场景中(如野外)可能是得不偿失的。因此,根据环境感知自适应地判定是否进行平面提取,将会更好地平衡精度与效率。



