1. 全场景无缝精密定位定姿系统
为实现全场景、高精度、高稳定、高可信的定位定姿,TJGNSS团队历时多年研究,搭建了集成GNSS、IMU、CAMERA、UWB和LIDAR的多传感器系统(PIONAS),支持GNSS/UWB/INS、GNSS/UWB/VIO、GNSS/UWB/LIO等各类模式的定位定姿技术,相关成果多次发表于IEEE TITS, IEEE IOT, GPS solutions, Journal of Geodesy等著名期刊。

2. 精密定位与建图平台
为满足不同场景下的高精度建图需求,TJGNSS团队在无缝精密定位定姿技术的基础上,发展了多种环境感知技术以高效提取场景中的结构及语义信息,所搭建的多源融合定位与建图平台可实现大范围的高精度建图工作。

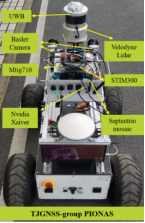
3.自动驾驶小车
TJGNSS团队合作搭建了具有无人驾驶功能,能够完成实时定位与建图(SLAM),多源传感器数据采集等任务的自动驾驶小车。平台以激光雷达(LiDAR)为核心传感器,实现了路径规划、障碍物检测、障碍物避让等功能。为深入研究环境感知等其他无人驾驶相关的功能提供基础。




